Hi there,
I am currently working on a project which has similarities to something showcased on the Nav2 website landing page. I would be after recommendations of global planner and local planner/controller plugins to execute a trajectory made of parallel passes spaced by a given constant offset distance. It is similar to what is visible below (visible on Nav2) website:

I was not sure in the example above which type of localization method was employed (GPS based for outdoor application, as it seem close to an agricultural outdoor application?). Unsure also who or which company would be behind (I could have given them credit for the illustration above), so would be thankful if the community would know who or which company is behind this illustration.
On my case, at the end of each straight pass (in blue), the robot could reposition via a curved trajectory or pause and execute two turns in place for the repositioning pass. I do not need to maintain speed during the turns.
So far I have explored the straight line global planner plugin as shown in the Nav2 example and trialed the Regulated Pure Pursuit and Vector Pursuit as local planner / controller. Is there other local planner I should consider for this type of application (straight line then repositioning to next straight line)? The goal is to be able to maintain a precise trajectory for the straight passes while going on an acceleration, cruise, deceleration speed profile on the straight lines. I am currently trialing those in Gazebo simulating the environment where the robot will be deployed. I am able to generate the required waypoints via the simple commander API and using AMCL for now as my application is indoor.
Using Gazebo and AMCL, here are the kind of things I obtain via PlotJuggler:
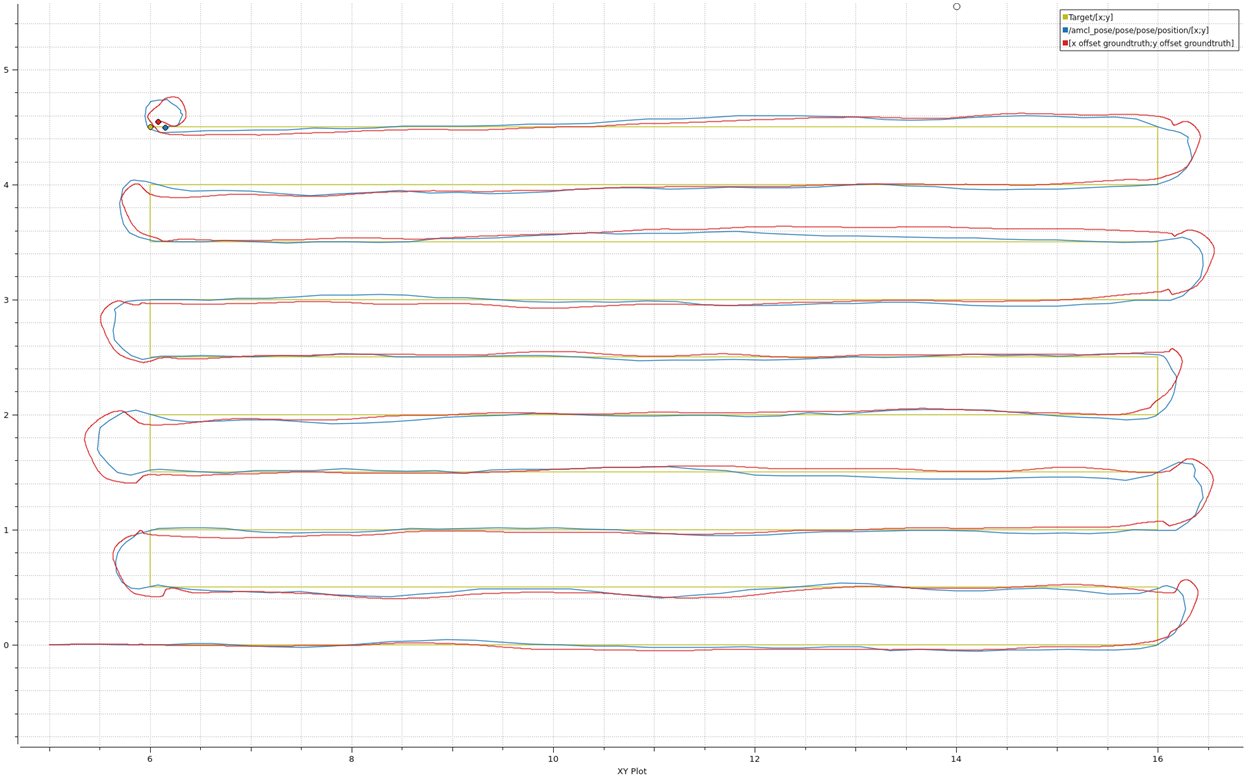
First of, there are differences between ACML and groundtruth, so AMCL would require some improvements, but I can see the AMCL goes by each corner which are waypoints, so the robot from its perception goes to all waypoints. Second the trajectory followed (groundtruth) is within +/-10cm of the target. Not sure if other or better tuned controller can improve the order of magnitude of the accuracy, I would be aiming to about +/-1cm at 1m/s. This is a combination of localization + control method. Open to discuss if I need to improve localization first (AMCL or other, such as Visual + IMU odometry, UWB, …). I am also using Humble which does not have the python API driveOnHeading, to trial a pure straight line command (maybe similar to broadcasting in /cmd_vel a positive x component).
Thank you very much for your help and guidance,
Nicolas
PS: first post on my side, so apologies if this is the wrong platform, I was trying to find out about a specific Nav2 platform but could not join the Nav2 slack.