ROS News for the Week of December 2nd, 2025

ROSCon 2025 videos are now available! If you want a quick summary of the event I put together ROSCon 2025 Recap for the OpenCV Weekly Webinar.


For Giving Tuesday we put together a new campaign for ROS users to become a become a Build Farm Backer. If you’ve every saved a few minutes by running sudo apt install ros-kilted-* instead of compiling from source we would love it if you helped cover our compute costs. Also, for the first time ever, we’re offering OSRF Infra Team swag. This week only you can get 20% off swag with the code GIVINGTUESDAY20.

This week @yukaitung released the LGDXRobot2, an open-source ROS 2 robot with decent performance.

I thought this was cool, someone put together a ground truth comparison between the Depth Anything 3 model and deployed RealSense sensors in the wild. TL;DR the error in the Depth Anything 3 model is about 0.5 m on average, but it varies based on the observation conditions. If you want to go try Depth Anything 3, there’s a great ROS 2 wrapper that was released a few weeks ago.
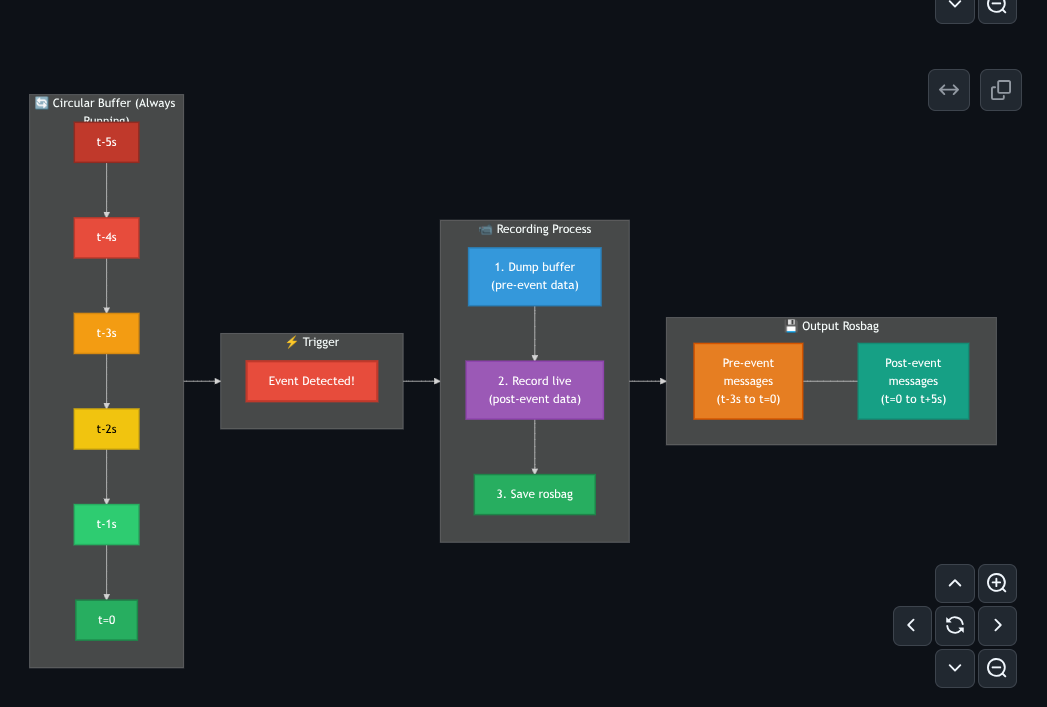
Here’s your cool tool of the week: ROS Time Machine, an event-triggered recording system for ROS bags. The system keeps a local data buffer and scans for trigger events to initiate recording bag data.
Events
- 2025-12-06 ML For Systems (i.e. robotics) at NeuralIPS
- 2026-12-06 ROS Japan UG #60 ROSCon Recap
- 2025-12-11 Paris Hardware Meetup on Building the Future of Robotics
- 2025-12-18 => 2025-12-20 ROSCon India 2025 Pune
- 2026-01-30 Dronecode + Septentrio Meetup: Leuven, Belgium
- 2026-1-31 => 2026-02-01 FOSDEM - Robot Dev Room
- 2026-04-17 Intrinsic AI for Industry Challenge Deadline
- 2026-07-29 => 2026-08-04 IEEE RAS Summer School on Multi-Robot Systems in Prague
- 2026-05-23 => 2026-05-24 Open Hardware Summit 2026 in Berlin
 CFP Now Open!
CFP Now Open! - Community meeting: Accelerating Physics-Based Multibeam Sonar Simulation for Underwater Robotics on CUDA
News
 Become a Build Farm Backer + Infra Team Swag
Become a Build Farm Backer + Infra Team Swag- ROS PMC Minutes for December 2, 2025
- ROS PMC Minutes for November 25, 2025
- Gazebo PMC Meeting Minutes 2025-11-24
- Gazebo PMC Meeting Minutes 2025-12-01
- Ros-controls PMC meeting 3rd December 2025
- OSRA TGC meeting minutes for August, 2025
- Summer Undergraduate Research Opportunity in Robotics
- Discussion on ISO draft on mobile robot interoperability
- Melonee Wise to lead KUKA’s new software and AI organization
- IEEE survey sheds light on how AI and humanoids will affect robotics in 2026
- U.S. backs Zipline with $150M for drone delivery in Africa
- iRobot debt acquired by contract manufacturer as bankruptcy looms
- MassRobotics expands physical AI fellowship with AWS and NVIDIA
- Popular AI models aren’t ready to safely run robots, say CMU researchers
- Physical Intelligence raises $600M to advance robot foundation models
- Forterra brings in $238M to scale AI platforms for defense applications
- Nvidia announces new open AI models and tools for autonomous driving research
- Behind the scenes of drone food delivery in Finland
- Bone AI raises $12M to challenge Asia’s defense giants with AI-powered robotics
- Why Not Everything is Automated in Manufacturing (Yet)
- Best Robotics Conferences and Events to Attend in 2026
- Robot Videos: Biorobotics, Robot EV Charging, and More
- Robot Videos: Disney’s Robotic Olaf, Robot T-Rex, More
ROS
- ROSCon 2025 Videos Now Available
- OpenCV ROSCon 2025 Recap
- A modern Python-based robot navigation simulator with a polished UI and pluggable algorithm system
- ROS Time Machine: an event-triggered recording system for ROS 2
- Depth Anything 3 Compared to RealSense Sensor see also Depth Anything 3 ROS 2 Wrapper
- ROS 2 Testing: A Practical Survival Guide – ROSCon ES 2025 Workshop
- New Packages for ROS 2 Rolling Ridley 2025-12-04
- New packages for Humble Hawksbill 2025-11-24
- Announcing a new ROS 2 compatible Java library
- The Genesys Robotics Framework.
- Qt6 QML ROS 2 plugin now available
- How to manage Robot / ROS 2 application via KubeEdge and Kubernetes
- ROS 2 Packages Based on Qualcomm Devices
- Vehicle_dynamics_sim: accurately and easily simulate actuation limits
- New ROS coding agent
- Model-Driven Development of Multiple ROS-based Robots.
- Environment Aware Trajectory Planning for Underwater Vehicle Manipulator Systems
- Community meeting: Accelerating Physics-Based Multibeam Sonar Simulation for Underwater Robotics on CUDA
- Humanoid Simulation using ROS 2 Jazzy and Gazebo Harmonic
- Declarative node interfaces + Static recovery of the ROS Graph
- LGDXRobot2: An Open-Source ROS 2 Robot with Decent Performance
- Navigation and Perception Framework in a Mine Site Inspection Robot - (Video)
- lidar_inertial_odometry: Tightly-Coupled Lidar Inertial Odometry
- PX4 and ROS 2 Via Micro XRCE-DDS: Configuration, Pitfalls, and Solutions (Video)
- A collection of ROS 2 packages for autonomous systems, supporting self-driving cars, mobile robots, quadcopters, and other robotic platforms
- Tool to add Tabular/CSV data to MCAP
- Enhanced Autonomous Navigation on the Perseverance Mars Rover
- Dynamic Risk-Aware MPPI for Mobile Robots in Crowds via Efficient Monte Carlo Approximations
- ROSCon FR & DE 2025 highlights
- osi-ros2-bridge: Publish ASAM OSI ground truth and feature data as ROS 2 messages
- ROS 2 AI Lectures with code and videos
- Tutorial on detecting an ArUco marker in Gazebo - ROS wrapper for ArUco Opencv module
- Copilot: A stream-based runtime-verification framework for generating hard real-time C code.
- The Mesh Navigation Stack: Efficient Mobile Robot Navigation in Uneven Terrain
- Near-Field Light Bundle Adjustment for SLAM in Dynamic Lighting
- Touch in the Wild: Learning Fine-Grained Manipulation with a Portable Visuo-Tactile Gripper
- pyoctomap: Python wrapper for the OctoMap C++ library
- Great Collection of Humanoid and Arm ROS 2 Packages / URDFs
- MASt3R-Fusion: Integrating Feed-Forward Visual Model with IMU, GNSS for High-Functionality SLAM.
- How to Use the Mosquitto MQTT Broker (With SSL/TLS)
- Robotic World Model: A Neural Network Simulator for Robust Policy Optimization in Robotics
- Building Room-Scale Language-Embedded Gaussian Splats (LEGS) with a Mobile Robot
- Codebase for Kinova Gen3 training in Isaac Lab, sim2real transfer and ROS deployment
- A rclpy-compatible Python library built directly on Fast DDS v3—designed to solve the friction of using ROS 2 with Python ML/AI libraries
- Python implementation of MPPI (Model Predictive Path-Integral) controller to understand the basic idea
- Foxglove schema message converter for RVL compressedDepth
- Monocular Online Reconstruction with Enhanced Detail Preservation
Got a Minute? 
![]() We need of more PR reviewers! If you have just an hour or two to contribute to our projects we would love for you to review a pull request, any pull request in any repo. All pull requests to OSRA projects get two reviews, and we have a ton of great new features that are waiting for their second review. The good news is that anyone is welcome to review a PR, and you don’t need to be a regular contributor or package maintainer to review a PR.
We need of more PR reviewers! If you have just an hour or two to contribute to our projects we would love for you to review a pull request, any pull request in any repo. All pull requests to OSRA projects get two reviews, and we have a ton of great new features that are waiting for their second review. The good news is that anyone is welcome to review a PR, and you don’t need to be a regular contributor or package maintainer to review a PR.
Our suggestion is that you pick a tool or library you use regularly and take a look at the outstanding PRs. Feel free to scan through the outstanding PRs to find one that you feel comfortable reviewing.