ROS News for the Week of November 10th, 2025




![]() We have so many ROS events happening worldwide right now!
We have so many ROS events happening worldwide right now!
Congratulations to our colleagues in ![]() Barcelona,
Barcelona, ![]() Shanghai, and
Shanghai, and ![]() Bogota on their successful regional ROS events last week!
Bogota on their successful regional ROS events last week!
Next week our first ever joint ![]() ROSCon France /
ROSCon France / ![]() ROSCon Germany is happening in Strasbourg with the annual
ROSCon Germany is happening in Strasbourg with the annual ![]() ROS-Industrial EU conference happening immediately afterwards.
ROS-Industrial EU conference happening immediately afterwards.

Our friends at Foxglove have raised a $40M series B round! I’ve said it before, and I’ll say it again, one of the most satisfying parts of my job is getting to watch companies in the ROS ecosystem grow and prosper. Congratulations all around Foxglove team!

Hot off of ROSCon 2025 in Singapore, Lionsbot, one of Singapore’s largest robotics companies, has joined the OSRA as a supporting member!

There is a new ROS 2 package that add supports the Unitree G1 Robot.

No depth camera? No problem! Depth Anything 3.0 is out! Depth anything is a deep learning model that predicts spatially consistent geometry from an arbitrary number of visual inputs, with or without known camera poses.
Events
- 2025-11-17 => 2025-11-18 ROS-Industrial Conference EU 2025
- 2025-11-17 => 2025-11-20 Joint ROSCon Germany and France
- 2025-11-20 Aerial Robotics Meeting
 2025-11-22 Silicon Valley Robotics Block Party with Brazilian BBQ and robot boxing
2025-11-22 Silicon Valley Robotics Block Party with Brazilian BBQ and robot boxing 
- 2025-12-06 ML For Systems (i.e. robotics) at NeuralIPS
- 2025-12-18 => 2025-12-20 ROSCon India 2025 Pune
- 2026-1-31 => 2026-02-01 FOSDEM - Robot Dev Room
- 2026-04-17 Intrinsic AI for Industry Challenge Deadline
- 2026-07-29 => 2026-08-04 IEEE RAS Summer School on Multi-Robot Systems in Prague
- 2026-05-23 => 2026-05-24 Open Hardware Summit 2026 in Berlin
News
- FOSDEM 2026: Robotics & Simulation Devroom, 2nd edition!
- Foxglove announces $40M series B
- Articulated Robotics: ROSCon 2025 Conversations
- Weekly Robotics #335
- Call for Papers — Special Issue on “State of the Art in Mobile Robot Localization”
- Fiction Lab’s new Raph Rover
- Call for Organizer: Maritime Community Working Group
- How one founder plans to save cities from flooding with terraforming robots
- Waymo’s highway driving sets stage for wider robotaxi expansion – including Las Vegas, San Diego, and Detroit
- Drone maker Neros closes Series B round to expand industrial capacity
- Terranova gets seed funding to deploy terraforming robots
- Foxglove raises $40M to scale its data platform for roboticists
- HistoSonics raises $250M for commercial expansion of Edison system
- This time, iRobot needs help cleaning up a mess
- Partner Robotics picks up funding to deploy more construction robots
- Robot Videos: Heavy Lift Drones, Humanoid Robots, More
- Ukraine Weapons Tech Thrives Amid Conflict
- Robotec.ai works with AMD, Liquid AI to apply agentic AI to warehouse robots
- Aerial Robotics Startup Infravision Raises $91M Series B As Funding To Sector Surges
- NVIDIA and Hyundai Motor Group Team on AI Factory to Power AI-Driven Mobility Solutions
- NVIDIA And OSRA Pioneers GPU-Aware ROS 2 For Accelerated Robotics Development
- The Non-Humanoid Robot Startups Are Rising Too
- NVIDIA accelerates open robotics at ROSCon Singapore with new collaborations and open-source tools - The Tech Revolutionist
- Schoolchildren create a robot that will represent Peru in global competition in Singapore | News | ANDINA - Peru News Agency
- NVIDIA Contributes to Open Frameworks for Next-Generation Robotics Development | NVIDIA Blog
- Swarmbotics AI develops robotic tank killers
ROS
- Depth Anything 3: Recovering the Visual Space from Any Views
- A ROS 2 Bridge for Lerobot so101 manipulator – documentation
- ROS 2 Package to work with the G1 Robot from Unitree
- Mars Rover Localization with Ground Penetrating Radar Dataset - UM Field Robotics: MarsLGPR
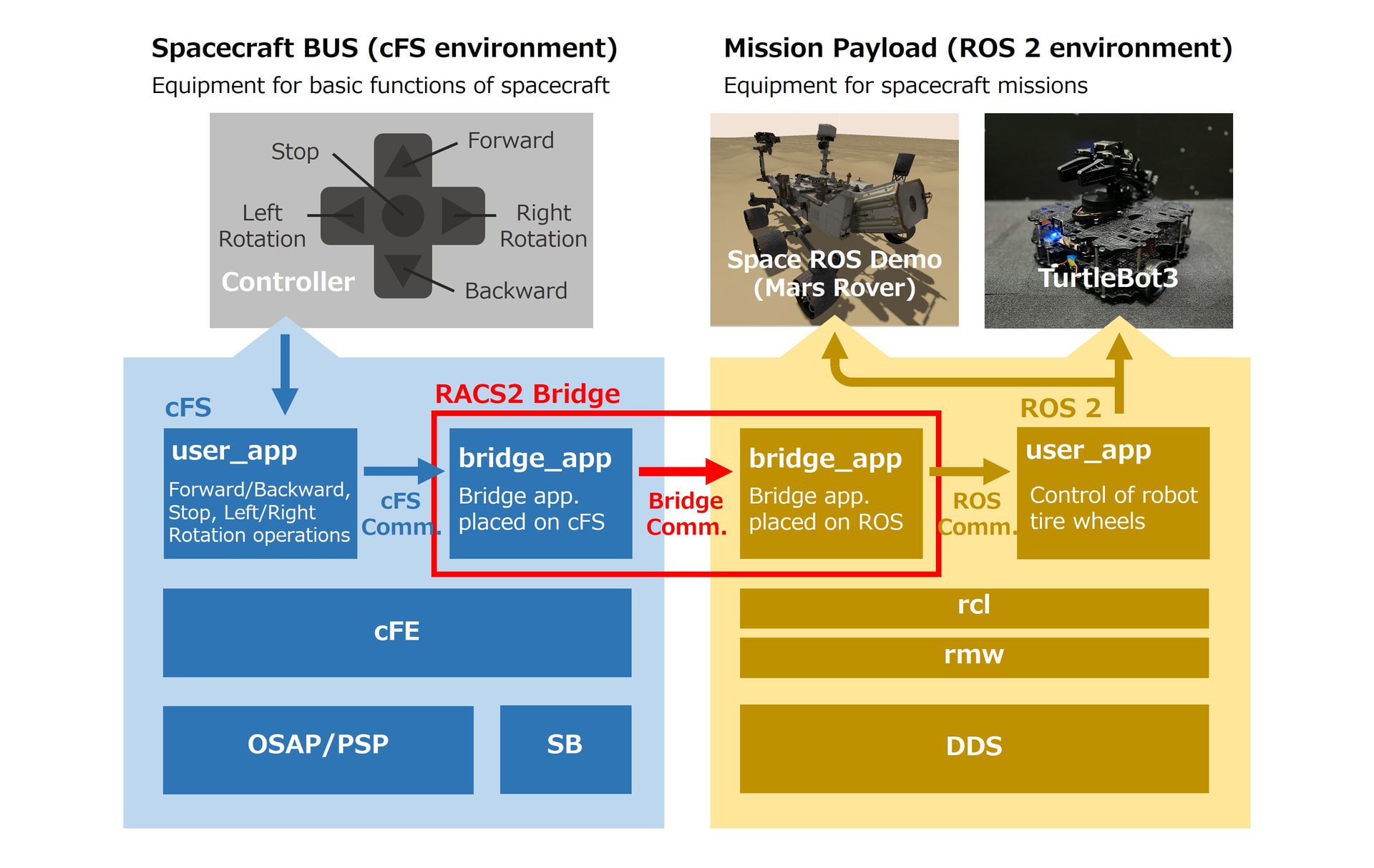
- Space ROS (RACS2) demonstration based on TurtleBot3
- R’DASH (Robot Information Telemetry Transport Dashboard) is an open-source, cross-platform dashboard for real-time robotic telemetry visualization
- From Pixels to Progress: The Role of Computer Vision in Agricultural Innovation (Video)
- Native buffer type
- Interoperability Special Interest Group: Setting up a project with the site editor
- ROSGraph Working Group kickoff
- Will Intrinsic supports ros2 on bazel with bzlmod?
- Space ROS Jazzy 2025.10.0 Release
- Space Station OS v0.8.6 — Integrated Orbital Dynamics and GNC Visualization
- ROS 2 Studio : VS Code
- Recursive Fiducial Marker
- Extending meta-ros with ROS 2 + openembedded (yocto)
- Asyncio For Robotics: Asyncio interface for ROS 2
- Introduction to ROS Part 8: Using Parameters to Configure ROS 2 Nodes
- Autonomous Docking with AprilTags Using Nav2
- LiDAR-Camera-Calibration: Robust, reproducible LiDAR–camera extrinsic calibration pipelines
- YOLOX + ROS 2 object detection package
- D-LIO: 6DoF Direct LiDAR-Inertial Odometry based on Simultaneous Truncated Distance Field Mapping
- SHeRLoc: Synchronized Heterogeneous Radar Place Recognition for Cross-Modal Localization
- Cognitive Architectures in Autonomous Robotics: A Systematic Review of Behavior Generation Approaches and Evaluation Strategies
- Oxford Day-and-Night Dataset
- Learning 1000 Tasks in a Day
- Kyocera triple lens AI depth camera enable recognition of thin and semi-transparent objects, wires
- Updated Space ROS Demos
- Enhancing Autonomous Navigation: Real-Time LIDAR Detection of Roads and Sidewalks in ROS 2
- Smart ROUV advances for enhanced navigation in the Suez Canal
- ROSBag MCP Server: Analyzing Robot Data with LLMs for Agentic Embodied AI Applications
- American Swarmbotics AI creates FireAnt ground-based anti-tank drones that can operate in swarms
- An improved facial emotion recognition system using convolutional neural network for the optimization of human robot interaction | Scientific Reports
- Pixi: Rust Tool Enhances Robotics Reproducibility and ROS Support
- OLLAMA - Getting Started Guide for AMD GPUs - Hackster.io
- SeaDragon – Unmanned technology demonstrator for German institute
Want to Contribute?
- We need someone to fix this bug in RViz 2 where the “Set Hidden” property is not functioning correctly.
- Are you a
 Rust user? We need someone to review this PR that adds the capability to create template Rust package to the ROS 2 CLI.
Rust user? We need someone to review this PR that adds the capability to create template Rust package to the ROS 2 CLI. - With the recent changes to the REP process we need to update docs.ros.org to point to the new REP website. I updated a dozen or so links yesterday, there are still about 66 other links that need to be updated. If you are looking for your first ROS contribution this is a really easy way to get familiar with our docs contribution process.