Hi everyone,
After months of debugging, patching, and testing, I’m excited to share a first working demo of ROS 2 Kilted running natively on macOS Apple Silicon. This includes support for major robotics frameworks:
-
 Gazebo (Ionic)
Gazebo (Ionic) -
 ros2_control
ros2_control -
 MoveIt 2
MoveIt 2 -
 Navigation2
Navigation2
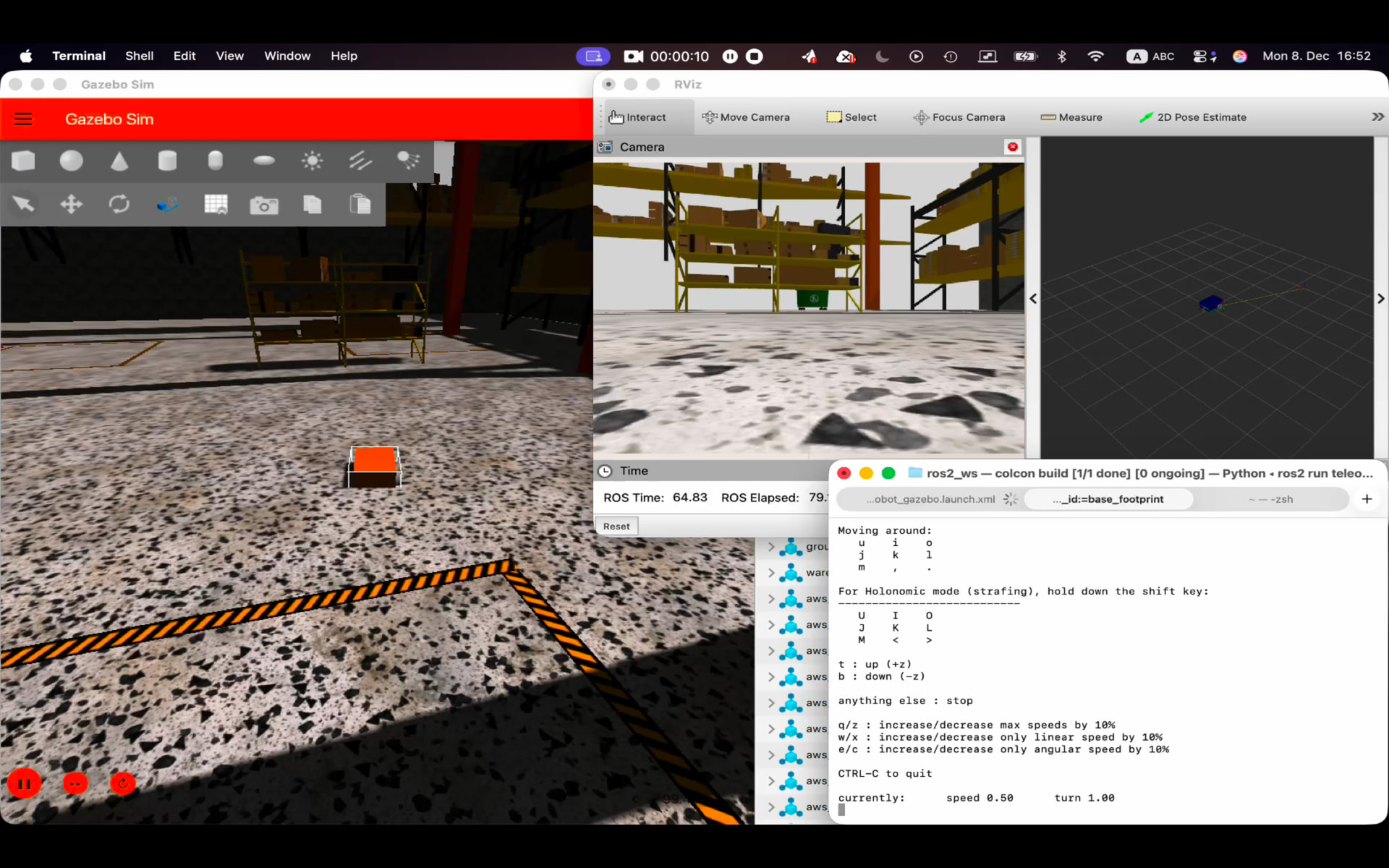
Demo (Video) Link: LinkedIn Demo
The demo showcases ros_gz_bridge in action, with real-time sensor and image data flowing between ROS 2 and Gazebo Ionic. Even ros2_control is running reliably — I’m still verifying some edge cases, but the core functionality is stable.
Most of the related pull requests have been merged upstream, so macOS support should soon be visible in the community. ![]()
I haven’t published the full kilted branch yet — planning to release it once I have solid demos for MoveIt 2 and Navigation2. Meanwhile, the Humble branch is already functional:
Humble Branch on GitHub
I’d love to hear feedback, suggestions, or experiences from anyone trying ROS 2 on macOS Apple Silicon!
Thanks,
Dhruv Patel
LinkedIn: https://www.linkedin.com/in/classy29
GitHub: https://github.com/idesign0