# Pre-built ROS2 Humble Windows SDK + Standalone RViz2 (No Toolchain Required)
Hi everyone,
I’d like to share two projects that may help developers working with ROS2 on Windows.
## The Problem
Compiling ROS2 on Windows has always been painful — it requires a complex toolchain setup (`rosdep`, `colcon`, Python dependencies, environment variables, etc.). Many developers simply give up or switch to WSL2, which has its own limitations for hardware access and GUI applications.
## Ros2Simple — Pre-built ROS2 Humble Windows SDK
A pre-compiled ROS2 Humble SDK for Windows x64 that allows you to build ROS2 applications using **standard CMake** — no ROS2 native toolchain, no `colcon`, no `rosdep`.
### Key features:
- Based on **ROS2 Humble**, Windows x64 Debug build
- Build with **CMake directly** — just point to the SDK path
- No ROS2 toolchain installation required
- Can be **cross-compiled to Linux and ARM-Linux** for industrial deployment
- Includes a working publisher/subscriber demo
### Quick build:
```bash
cd demo && mkdir build && cd build
cmake ..
cmake --build . --config Debug
demo_pubsub.exe pub
```
## Rviz2Windows — Standalone RViz2 for Windows
A standalone RViz2 that runs on Windows by **double-clicking `rviz2.exe`** — no ROS2 installation, no environment configuration, no dependencies to install.
### Key features:
- Built from **ROS2 Humble** source
- **Zero configuration** — double-click to run
- All dependencies bundled (Qt5, Ogre3D, plugins)
- Works with ROS2 nodes built from Ros2Simple or any DDS-compatible node
### Demo screenshots:
**Publisher / Subscriber running on Windows:**
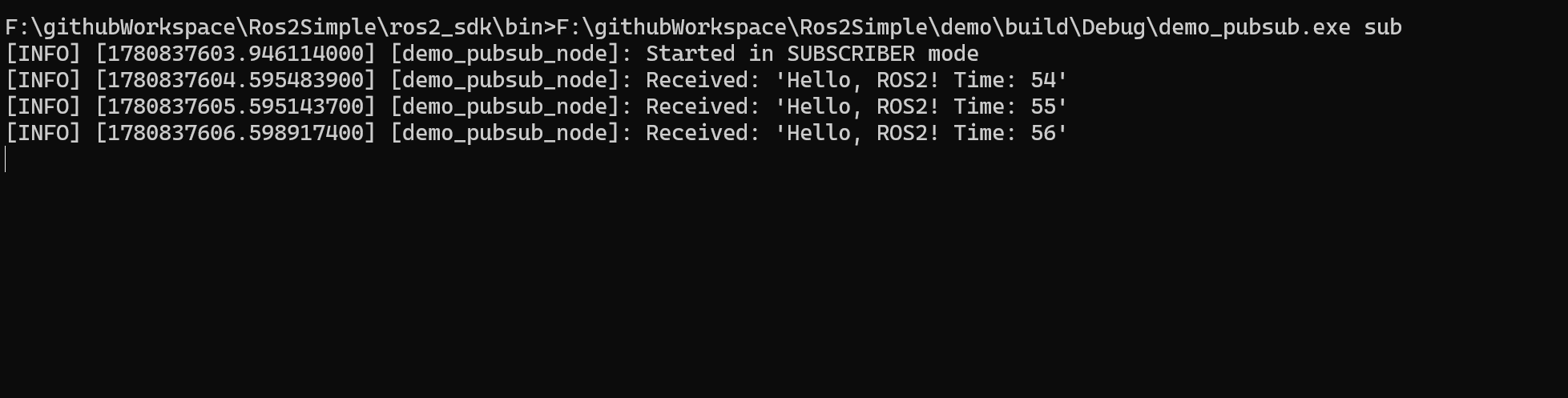
{kind=link}
**RViz2 running standalone on Windows:**
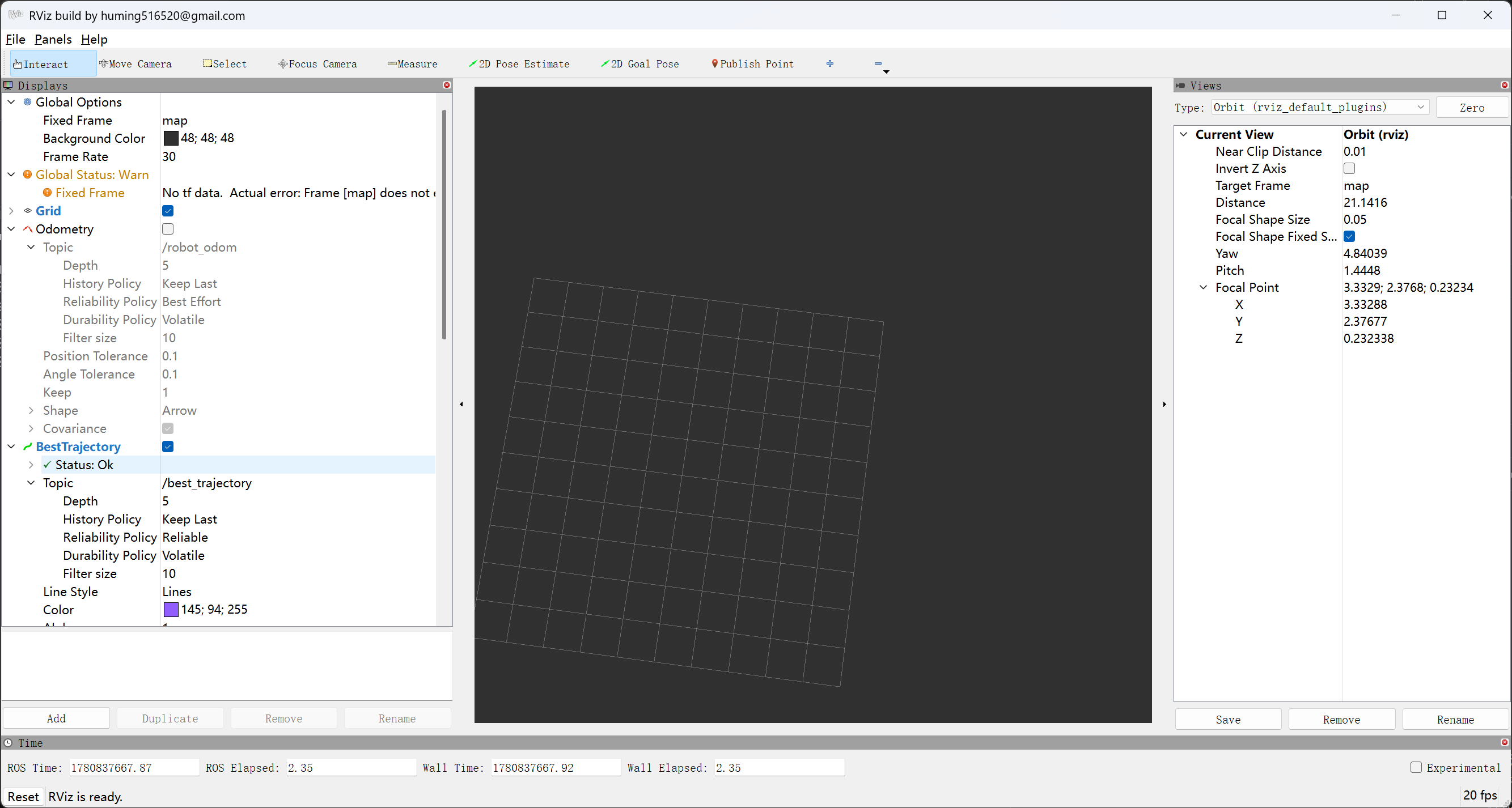{kind=link}
## Use Cases
- **Industrial deployment**: Build ROS2 applications on Windows-based industrial PCs
- **Education**: Students can start learning ROS2 without struggling with environment setup
- **Rapid prototyping**: Quick iteration without the overhead of the full ROS2 toolchain
- **Cross-platform products**: Compile the same codebase to Linux / ARM-Linux for production
## License
Both projects are based on ROS2 Humble source code and comply with the original ROS2 licenses (Apache License 2.0 / BSD License). All third-party libraries retain their original licenses.
## Feedback Welcome
I’d love to hear your feedback, suggestions, or issues. Feel free to open GitHub issues or reach out.
If you have commercial needs (custom builds, consulting, industrial deployment, training), you can contact me at: **huming516520@gmail.com**
Thanks!