Hi ROS Community,
I’m excited to share a new tool I’ve been developing called UrdfArchitect.
UrdfArchitect is a state-of-the-art, web-based visual environment engineered for the seamless creation, manipulation, and export of Unified Robot Description Format (URDF) models. By abstracting the complexities of raw XML authoring into an intuitive graphical interface, it empowers roboticists to focus on design and innovation.
This platform orchestrates the entire robotic modeling lifecycle—from kinematic skeleton definition to high-fidelity geometric detailing and precise hardware specification. Enhanced by Generative AI, UrdfArchitect accelerates prototyping and ensures compatibility with industry-standard simulation ecosystems like MuJoCo.
Live demo: https://urdf.d-robotics.cc/
GitHub Link: https://github.com/OpenLegged/URDF-Architect
Core Capabilities
-
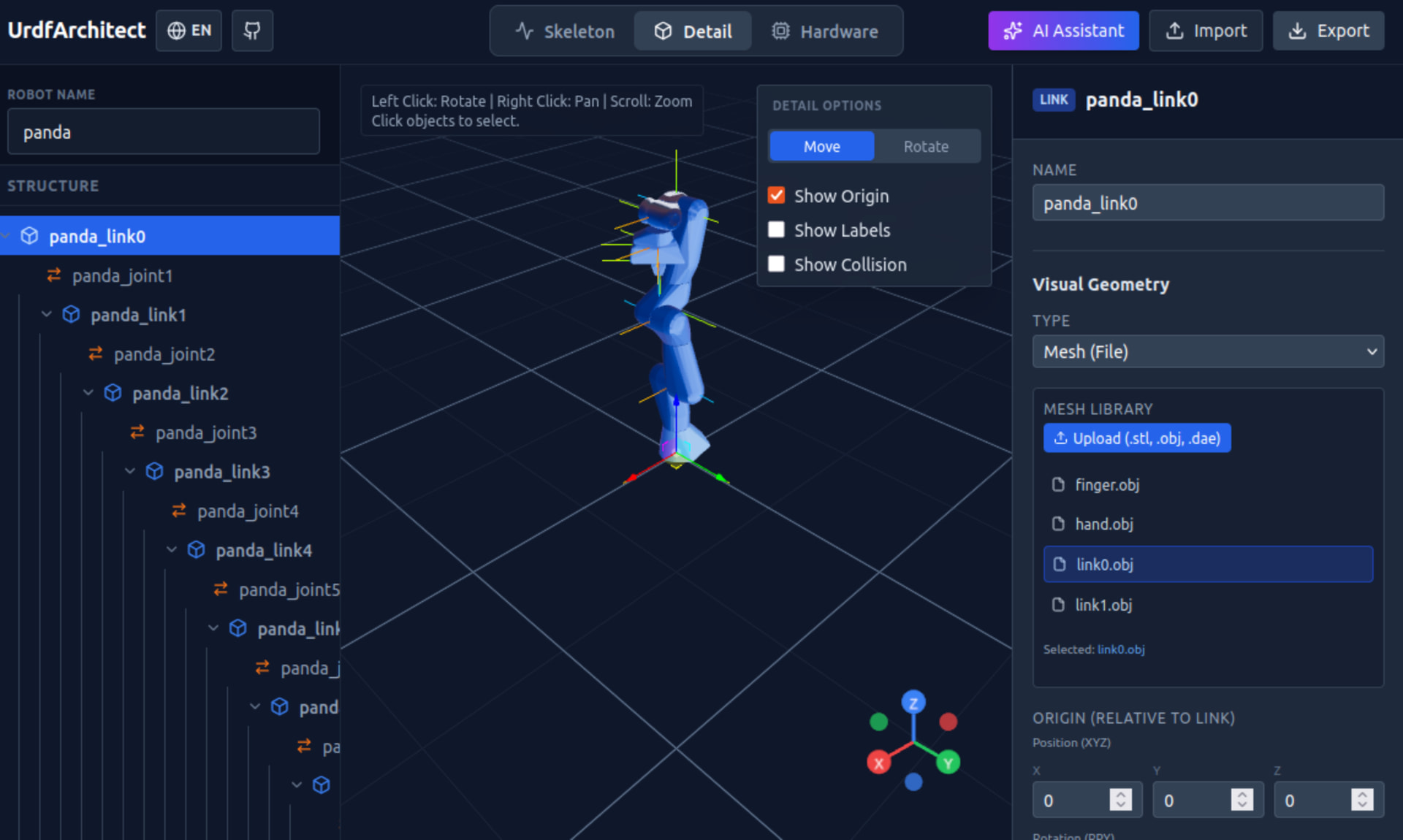
 Multi-Mode Design: Seamlessly switch between Skeleton (kinematics), Detail (meshes/collisions), and Hardware (actuator/transmission) design phases.
Multi-Mode Design: Seamlessly switch between Skeleton (kinematics), Detail (meshes/collisions), and Hardware (actuator/transmission) design phases. -
 Immersive 3D Workspace: Real-time, high-fidelity visualization powered by Three.js. Includes professional transformation gizmos and instant visual analytics for joint axes and frames.
Immersive 3D Workspace: Real-time, high-fidelity visualization powered by Three.js. Includes professional transformation gizmos and instant visual analytics for joint axes and frames. -
 AI-Augmented Engineering: A natural language interface (OpenAI/DeepSeek) to automate complex tasks—generate entire quadruped platforms or integrate sensors using simple text prompts.
AI-Augmented Engineering: A natural language interface (OpenAI/DeepSeek) to automate complex tasks—generate entire quadruped platforms or integrate sensors using simple text prompts. -
 Seamless Interoperability: * Import: One-click ZIP ingest of URDFs and meshes.
Seamless Interoperability: * Import: One-click ZIP ingest of URDFs and meshes.- Export: Production-ready packages including standard URDFs, automated BOM (CSV), and pre-configured MuJoCo XML.
-
 Built-in Motor Library: Instant access to industry-standard actuators from Unitree (Go1/A1) and RobStride, with easy custom extensions.
Built-in Motor Library: Instant access to industry-standard actuators from Unitree (Go1/A1) and RobStride, with easy custom extensions.
I’d love to hear your feedback or feature requests! If you find it useful, feel free to give it a ![]() on GitHub or contribute to the development.
on GitHub or contribute to the development.