Posted by @gmchoi96:
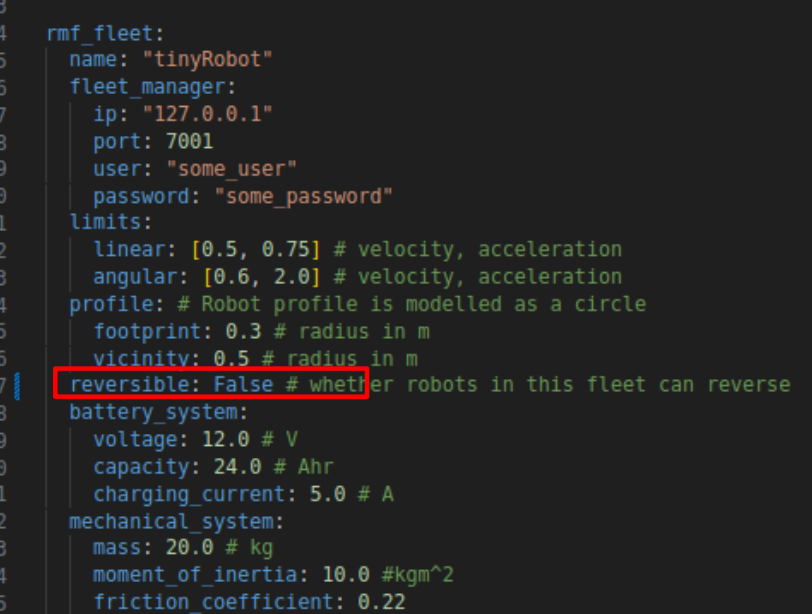
In the Tiny Robot config file, “reversible” is changed to false, but if the vehicle enters the wrong path, it will reverse. Is there any other way to prevent backwards movement?
back.webm
Posted by @gmchoi96:
In the Tiny Robot config file, “reversible” is changed to false, but if the vehicle enters the wrong path, it will reverse. Is there any other way to prevent backwards movement?
Posted by @mxgrey:
This parameters will prevent Open-RMF from making plans that assume the robot will drive in reverse, but Open-RMF doesn’t have direct control over whether the robot chooses to drive in reverse in order to reach the goals that Open-RMF gives.
Instead to prevent the simulated TinyRobot from driving in reverse you need to change the reversible parameter in its SDF to false. That will tell the plugin that actually controls the robot to never drive it in reverse.
Posted by @gmchoi96:
Thank you !