Posted by @eeoon:
Operating system and version:
Ubuntu 22.04
Open-RMF version or commit hash
21.09
ROS distribution and version:
Humble(ros2)
I have issued a command to move the robot in RMF. However, the robot is not moving in reality. In RViz, I can see that only the yellow circle is moving along the path, while the blue circle remains stationary. I have created the path and nodes using the traffic editor and have adapted the robot. Could you please provide any insights as to why it is not moving?
terminal 1 : ros2 launch rmf_demos_gz_classic house.launch.xml (display : gazebo & rviz)
terminal 2 : ros2 run rmf_demos_task dispatch_loop -s start0 -f wp5 -n 1 --use_sim_time
Posted by @eeoon:
i solve this problem!
this is robot control_type error, read_only. so i change the control_type.
is the ‘slotcar.so’ full_control, right?
and i have a question.
i know ‘robot_config.yaml’ file is the robot’s spec parameters. but robot simulation in gazebo control by ‘model.sdf’(<plugin name blah blah /plugin>) why is different of rmf_core?
which one should i choose?
Posted by @aaronchongth:
Hello @kyu8456!
The robot’s spec parameters in the robot_config.yaml are used by Open-RMF to estimate the future motion trajectory of the robot during navigation in order to avoid conflicts in the future, while the specs in the gazebo plugins are used to drive the robot through the physics engine of the simulator.
The proposed workflow would be to tune the robot parameters mentioned in your model.sdf to be similar to your physical robot’s or to have the desired behavior (speed, mass, friction, etc), and then tune the parameters in the robot_config.yaml to allow Open-RMF to have the best estimate of the robot’s behavior in the future.
Posted by @eeoon:
Thank for your reply!
I understand the model.sdf is just model’s specs for simulation and robot_config.yaml is rmf_core specs right?
umm.. yeah.
i have a few issues with following workflow. so i got some questions.
i solve the control_type error and check the robot moving in the rmf_gz_classic ~~.xml
so I try the free-fleet for connecting others robot. so i try one-robot first like turtlebot3.
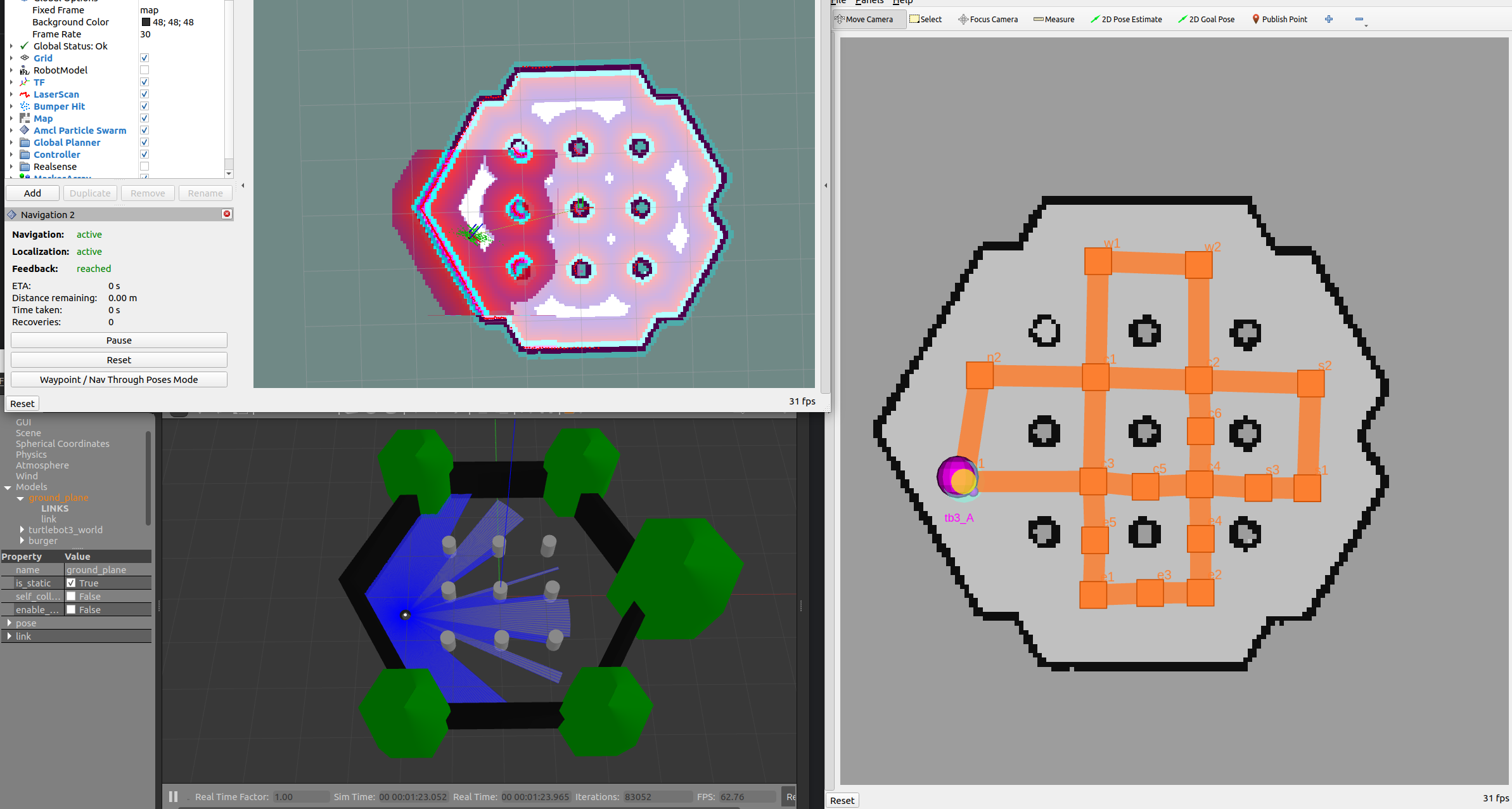
open_rmf free-fleet example, turtlebot3_ff.launch.xml(client), turtlebot3_ff_server.launch.xml(server) and rmf_demos world.launch.xml(core) → (picture)
and i modify server’s arguments for tf error. so robot(pupple circle) is on the nav_graph(n1). (but, it may not be accurate. i try many test to get translation (x,y,scale) value)
finally i try the command $ ros2 run rmf_demos_task dispatch_patrol -p n2 --use_sim_time
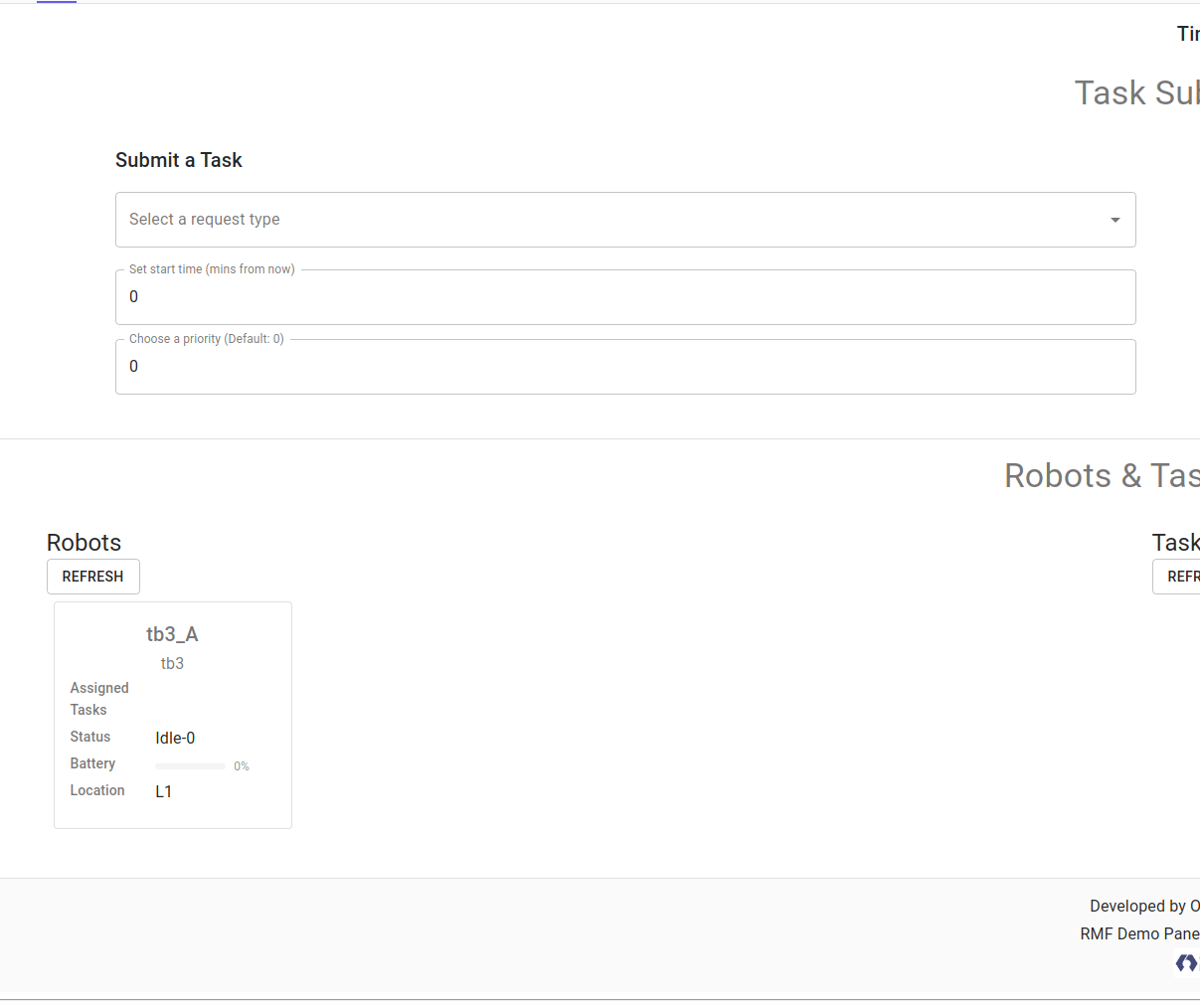
but the robot is not moving and i check the robot_state through rmf_web_panel(picture)
i have some error about battry, i saw the line “Battery State of Charge needs to be between 0.0 and 1.0.”
i have two question. i will solve this error.
- Is this an issue with the robot just not being docked correctly? If this is a problem, how can I convert tf correctly?
- the battery_error, how do i change the battery state of charge value to 1?
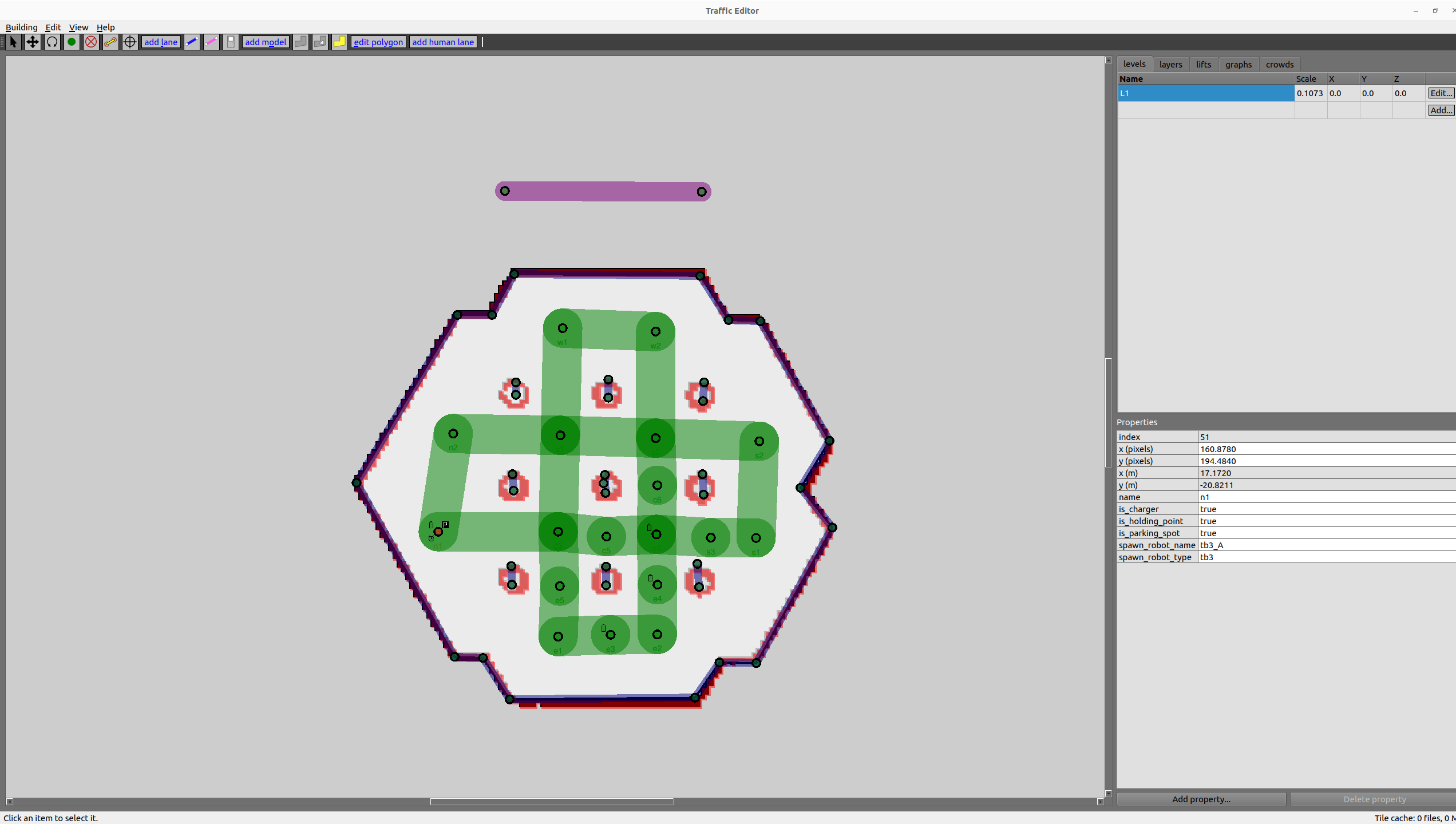
world.building.yaml edited with traffic-editor like this(picture)
Edited by @eeoon at 2023-07-11T02:01:52Z