Posted by @piliwilliam0306:
Hi,
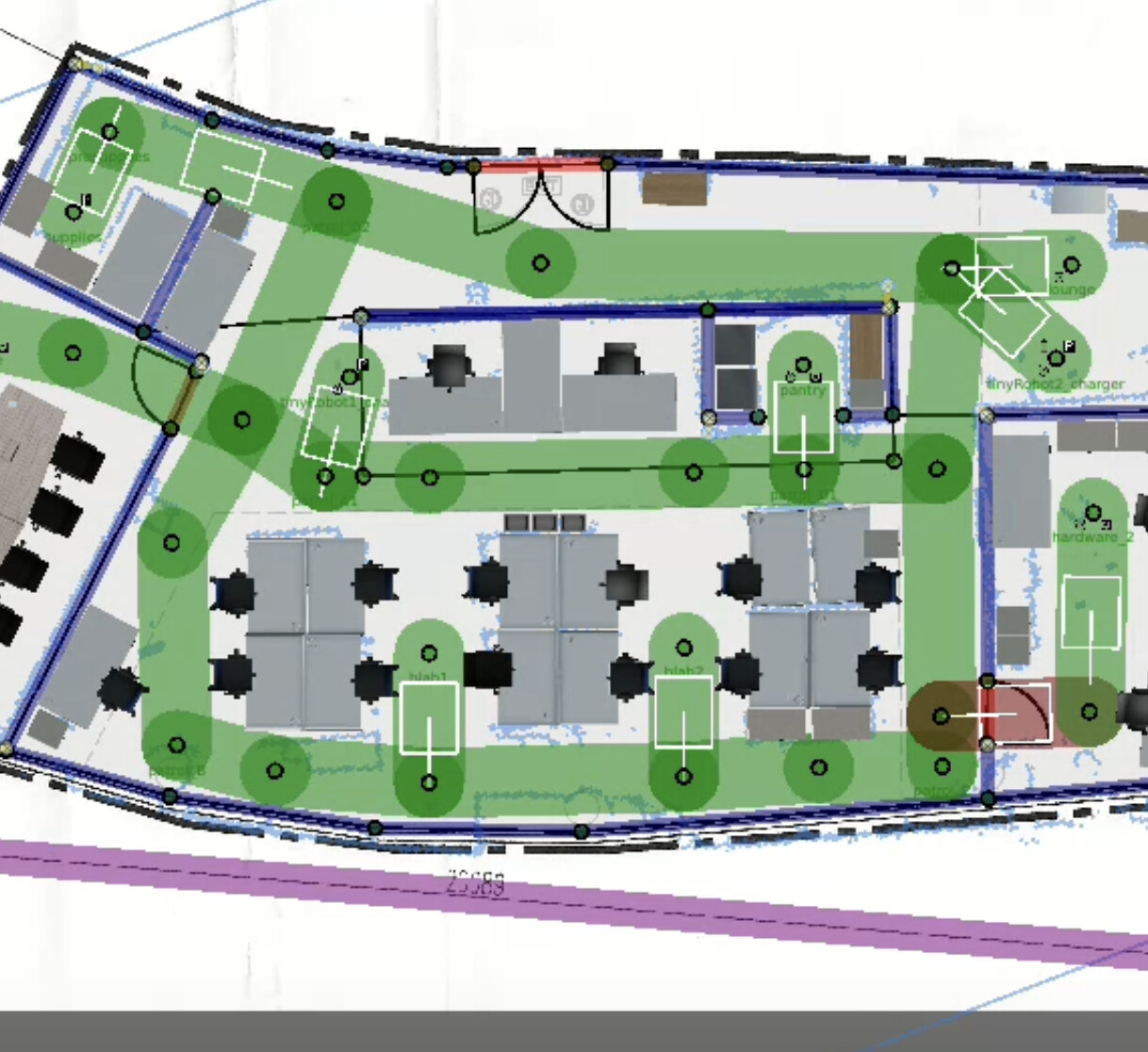
I’m trying to understand the behavior when orientation is set in the Traffic Editor.
My expectation is that when tinyRobot1 moves from blah2 to tinyRobot1_charger, it should move forward.
Similarly, I expected tinyRobot2 to move forward when traveling from tinyRobot2_charger to supplies.
However, instead of moving forward, the robot rotates in place and moves backward.
Is this behavior expected? If so, how can I configure it to meet my expectation?
Script I ran for tinyRobot1:
ros2 run rmf_demos_tasks dispatch_patrol -p blah1 blah2 -n 1 --use_sim_time
Video recording:
Screencast from 12-22-2024 02:44:56 PM.webm
Script I ran for tinyRobot2:
ros2 run rmf_demos_tasks dispatch_patrol -p supplies lounge -n 1 --use_sim_time
Video recording:
Screencast from 12-22-2024 03:34:42 PM.webm
Thanks!
Edited by @piliwilliam0306 at 2024-12-22T07:46:04Z