ROS News for the Week of September 22nd, 2025

Sunday, 2025-09-29T06:59:00Z is the last day to purchase regular priced ROSCon tickets! Workshops are starting to sell out, so we recommend you purchase your tickets as soon as possible.


The Gazebo Jetty logo has been released along with the top contributors for Gazebo Jetty. We want to extend a big “THANK YOU ![]() ” to everyone who helped make the Gazebo Jetty release a success!
” to everyone who helped make the Gazebo Jetty release a success!
Please join us next Wednesday, 2025-10-01T16:00:00Z for our Gazebo Jetty Demo Day, the entire core dev team will be on hand to show off all of the great new features in Gazebo Jetty.
As part of the release process we are running a Gazebo Community Survey to help us plan what features will be included in the Gazebo K release.
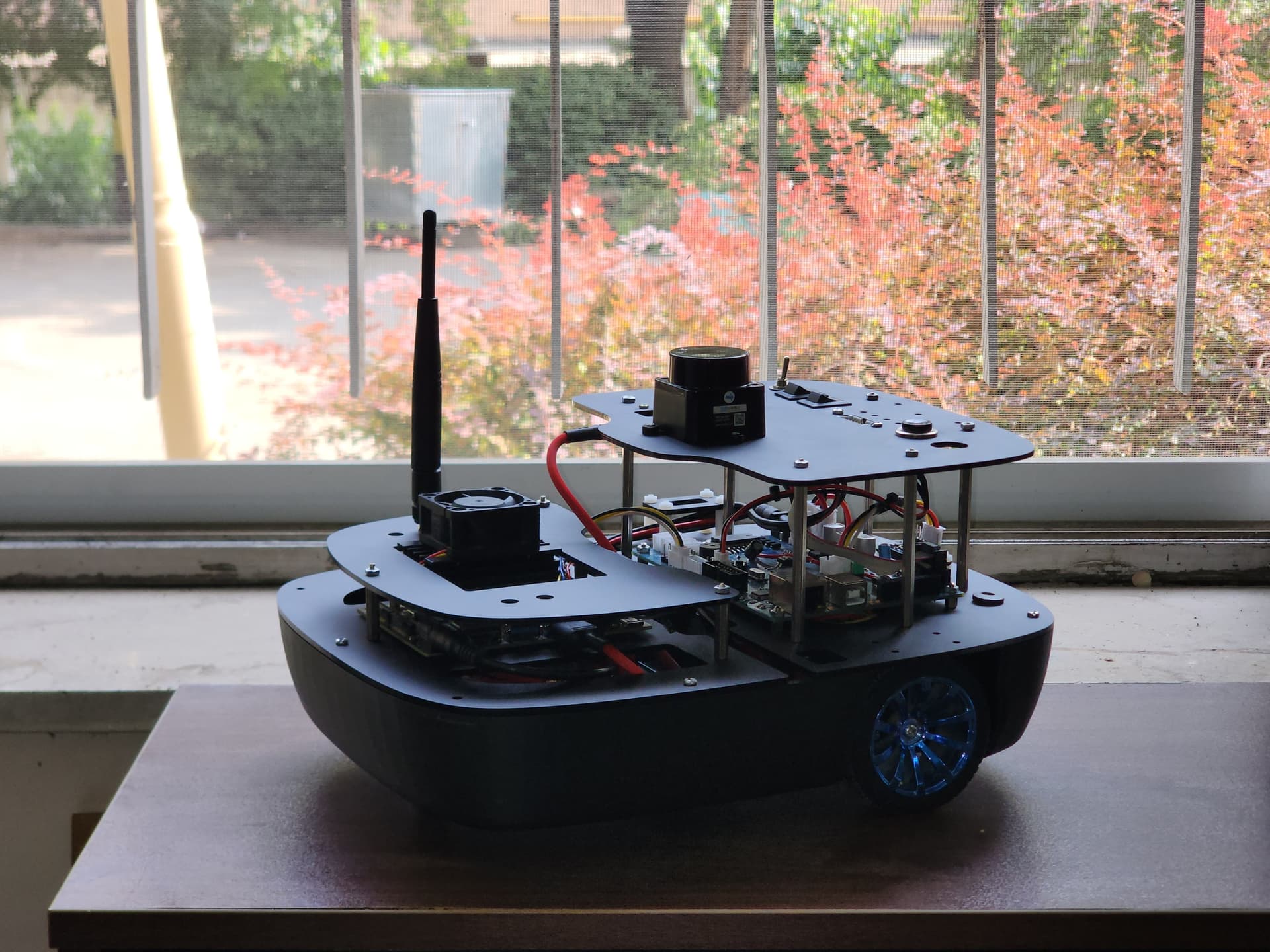


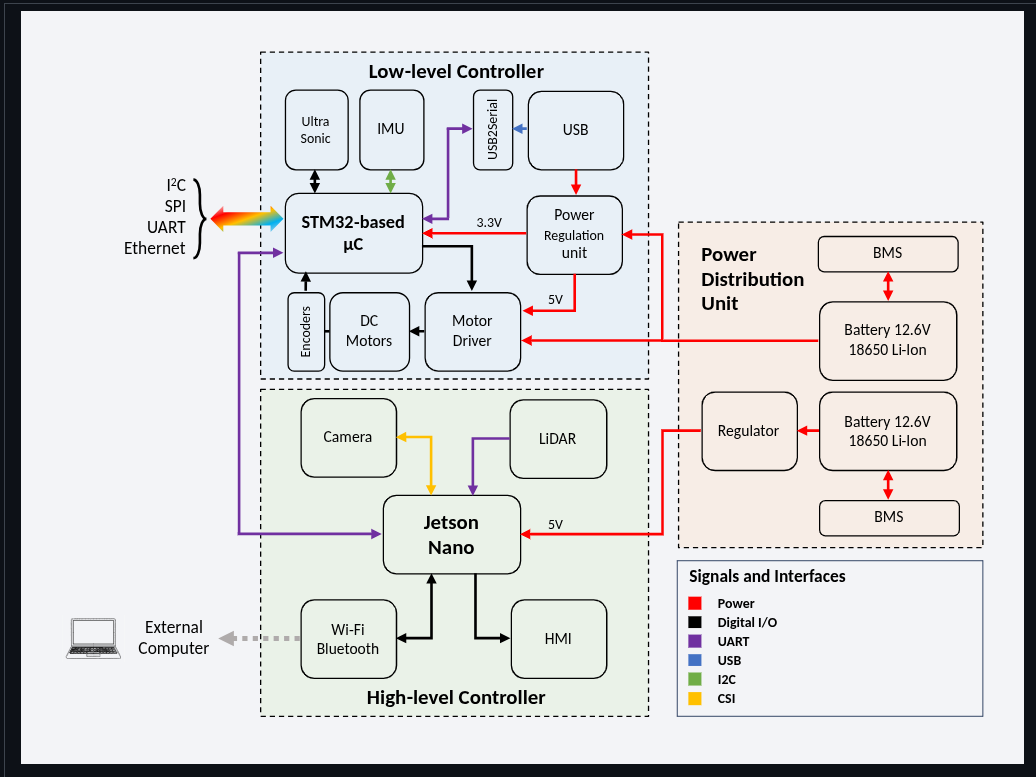
Check out the Lenna AMR, a completely open source hardware and software ROS mobile robot.

Our colleagues at NIST are once again running their Agile Robotics for Industrial Automation Competition (ARIAC). The ARIAC competition uses ROS and Gazebo to simulate a EV battery factory, and competitors must program the robotic systems to perform a specific task. There is a fairly substantial prize pool for the top performers.
Our colleagues in Colombia have informed me that they are holding another ROS Meetup Bogotá on November 11th.
Events
- 2025-09-26 Mass Robotics Career Fair
- 2025-09-27 RoboBoston the largest celebration of robots and robotics
- 2025-09-30 Introducing Pico-ROS LinkedIn Webinar
- 2025-10-01 Gazebo Jetty Demo Day
- 2025-10-1 CFP IEEE Service Learning Grants, Robot Accessibility
- 2025-10-27 =>2025-10-30 ROSCon Singapore
- 2025-10-30 => 2025-10-31 ROSCon China Shanghai
- 2025-11-04 => 2025-11-05 ROSCon España 2025
- 2025-11-06 Unitree G1 Humanoid Robot Certificate Training in Barcelona, Spain
- 2025-11-07 ROS Meetup Bogotá Colombia
- 2025-11-10 ROSCon India 2025 Call for Proposals
- 2025-11-10 => 2025-11-11 PX4 Developer Summit
- 2025-11-17 => 2025-11-18 ROS-Industrial Conference EU 2025
- 2025-11-17 => 2025-11-20 Joint ROSCon Germany and France
- 2025-12-06 ML For Systems (i.e. robotics) at NeuralIPS
- 2025-12-?? ROSCon India 2025 Pune
News
- Gazebo Jetty, tutorial party results and artwork!
 Gazebo-K Roadmap: Share Your Feedback in Our Community Survey!
Gazebo-K Roadmap: Share Your Feedback in Our Community Survey! ARIAC 2025 Registration Open - Industrial Robotics Competition Using ROS/Gazebo
ARIAC 2025 Registration Open - Industrial Robotics Competition Using ROS/Gazebo- Gazebo PMC Meeting Minutes 2025-09-22
- ROS PMC Minutes for September 23, 2025
- Ros-controls PMC meeting 24 September 2025
- The Top Programming Languages 2025
- Robot Videos: Google Gemini Robotics, Jedi Mode, More
- Unitree Robot Hack: What You Need to Know
- The Cybersecurity of a Unitree Humanoid Robot – TL;DR
- Google DeepMind unveils its first “thinking” robotics AI
- Gemini Robotics 1.5 enables agentic experiences, explains Google DeepMind
- IEEE study group publishes framework for humanoid standards
- AMP acquires Portsmouth recycling operations from RDS of Virginia
- CreateMe innovates with robotic assembly, adhesion tech for the garment industry
- Auterion raises $130M to build drone swarms for defense
ROS
- MCAP support lands in Rerun
- Lenna-Mobile-Robot-ONE: An autonomous mobile robot - CAD designs - MCU Board
- GSoC 25 — Modernisation of vcstool with Open Robotics
- FULL TUTORIAL: Isaac SIM → isaac_ros_foundationpose → ManyMove
- PSA: Debian Bookwork Boost rosdep entries
- ROSBag MCP Server Research | Cloud Robotics WG Meeting 2025-09-24
- Any Interest in Non-Destructive Testing?
- Built a browser-based tool to assemble robots & export URDFs in minutes
- Compliant Manipulator for PiH task
- New packages for Humble Hawksbill 2025-09-19
- New packages for Jazzy Jalisco 2025-09-19
- Fast and Adaptive Perception and Planning for UAVs in Dynamic Cluttered Environments
- MotionTrans – VR Data Enabled Motion-Level Learning for Robotic Manipulation Policies
- Docker container for HSR and ROS 2
- Vision-Language-Action Models for Robotics: A Review Towards Real-World Applications
- Lekiwi Mobile Trash Can
- GraspFactory: A Large Object-Centric Grasping Dataset
- lidar_odometry: Probabilistic Kernel Optimization for Robust State Estimation
- Probabilistic Kernel Optimization for Robust State Estimation
- A Map-based Localization System for Ingenuity using Deep Image Matching
- Example manipulation behaviors using behavior trees
- How to make a Raspberry Pi 5 actually work
- An MPC framework for efficient navigation of mobile robots in cluttered environments
- Recap of the 2025 Pan-African Robotics Competition(Video)
- A mobile-robot navigation planner for navigating among movable obstacles
- Remote Omniverse HITL via Zenoh DDS
Got a Minute? 
Do you use ROS at work? Please consider asking your employer to join the Open Source Robotics Alliance (OSRA). The OSRA helps fund ROS and Gazebo development and supports our critical infrastructure like the ROS build farm. Membership information is available on the OSRA website.