Posted by @jamietjx:
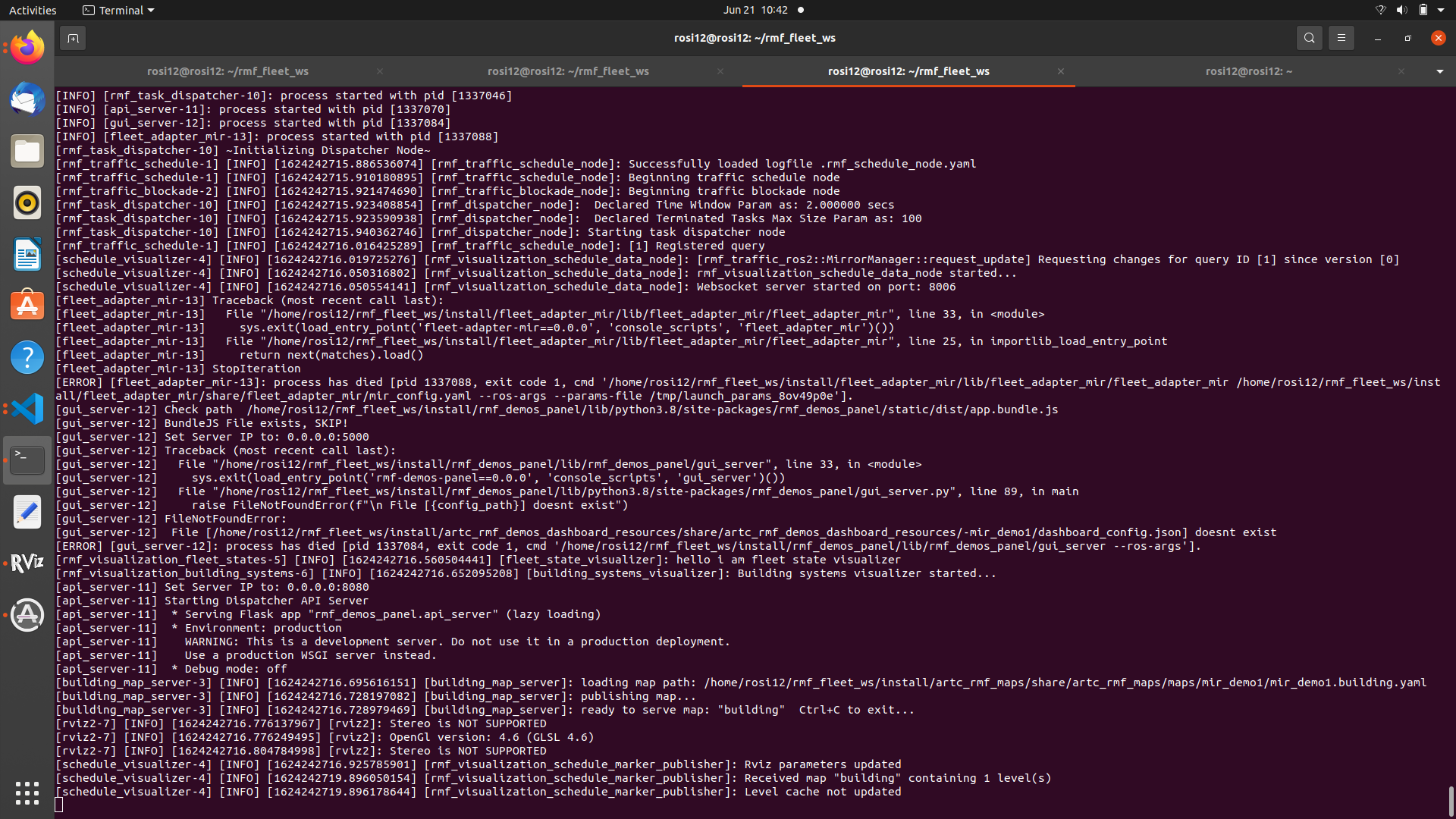
After running the schedule node and the fleet adapter mir, i launch the demo file to run visualization of the fleet and map on rviz.
In the photo below it states that the rmf_visualization_schedule_marker_publisher received the map, however it could not update the level cache.

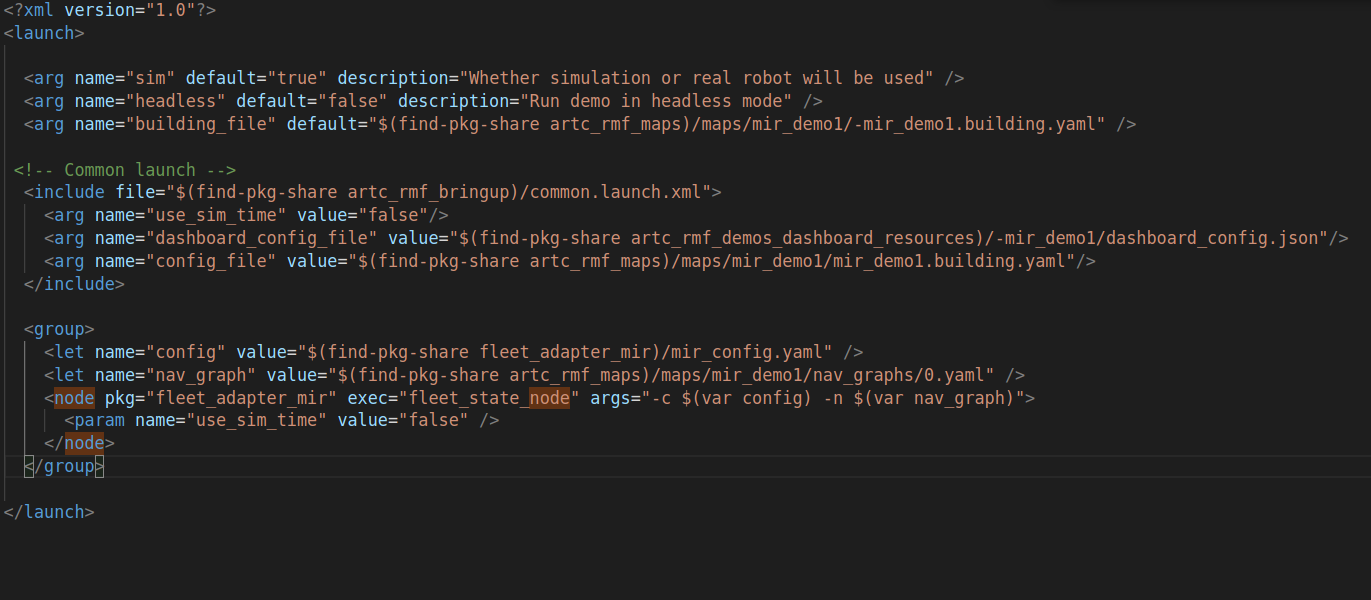
Below is a photo of my launch file:
Edited by @jamietjx at 2021-06-21T02:51:59Z
Posted by @Yadunund:
Hello @jamietjx ,
In the future it will be helpful if you can share more about your current setup including details on
- Operating system and version:
- ← OS and version (e.g. Ubuntu 20.04, MacOS 10.17, Windows 10 build 1817) →
- OpenRMF installation type:
- ← How did you install OpenRMF? From source, from binaries, Docker, etc. Link to a guide if you followed one. →
- OpenRMF version or commit hash
- ← If from binaries or docker, give the version. If from source, give the output of git rev-parse HEAD or the repos file you use →
- ROS distribution and version:
- ← State the name of the ROS distribution you are using, and if applicable a patch version →
- ROS installation type:
- ← How did you install ROS? From source, from binaries, Docker, etc. Link to a guide if you followed one. →
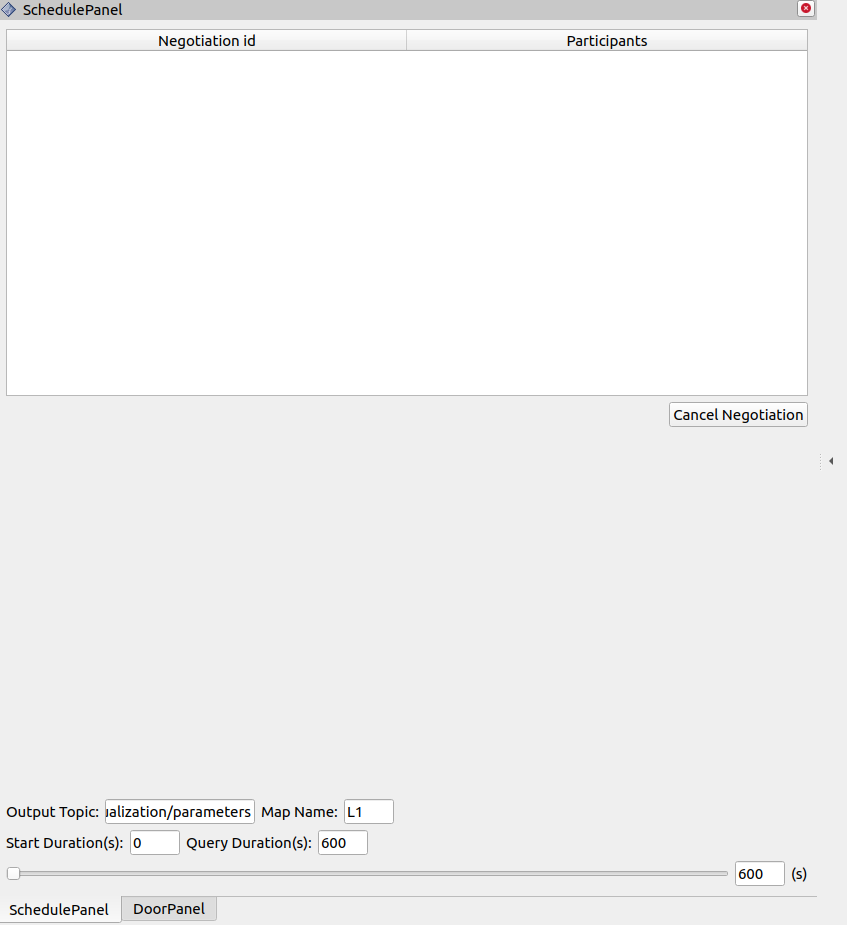
From a quick glance, it looks like you are not passing initial_map argument when you include the common.launch.xml file in your launch file above. Without passing this, the schedule visualizer will set a default value of “L1” as the initial map name. Hence, if none of the levels in your Building are named “L1”, the map markers will not be published to Rviz. So make sure that parameter is passed correctly. Alternatively, you can enter a valid map name in the “Map Name” box in the SchedulePanel in Rviz. You can save the Rviz config with the correct map name to avoid this in future runs.
Posted by @jamietjx:
Thank you so much for the help