Posted by @KamalanathanN:
Hi, I have configured my ROS1 melodic robot with free_fleet and using ROS2 galactic on laptop as ros2 server and
RMF is build from source.
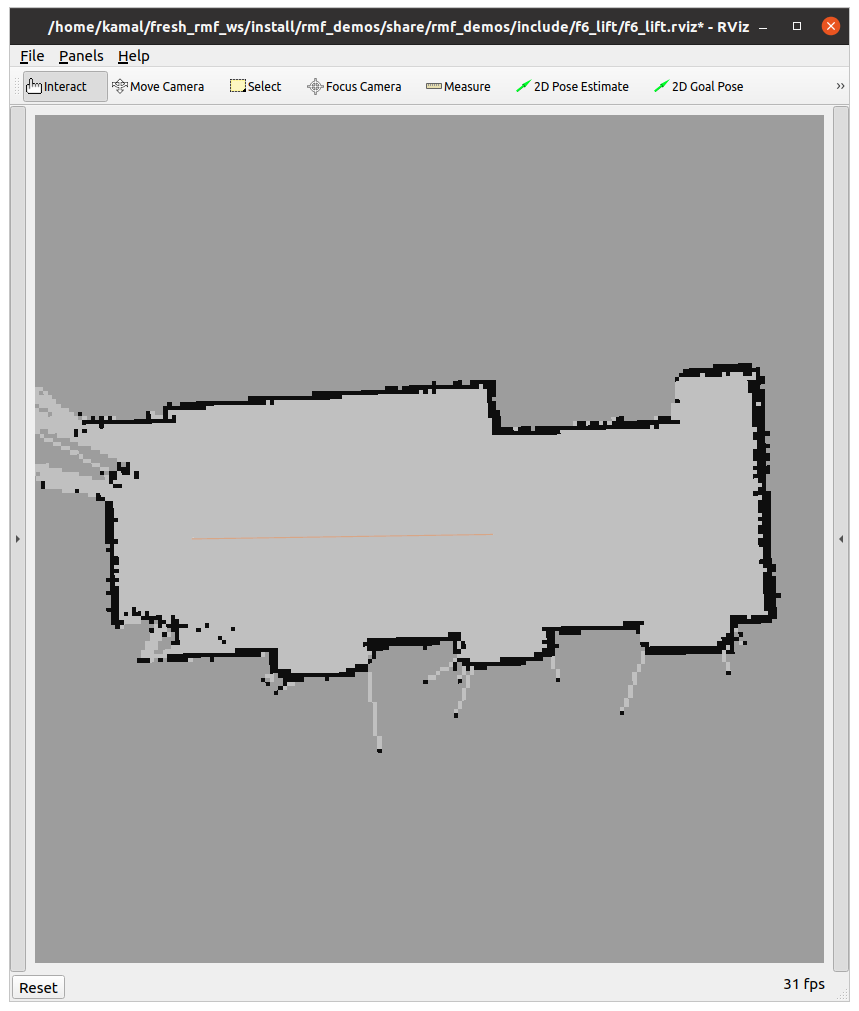
For creating building.yaml file i dont have the floor plan so i used the robot’s scan map for both Levels and Layers. hope that’s ok ![]()

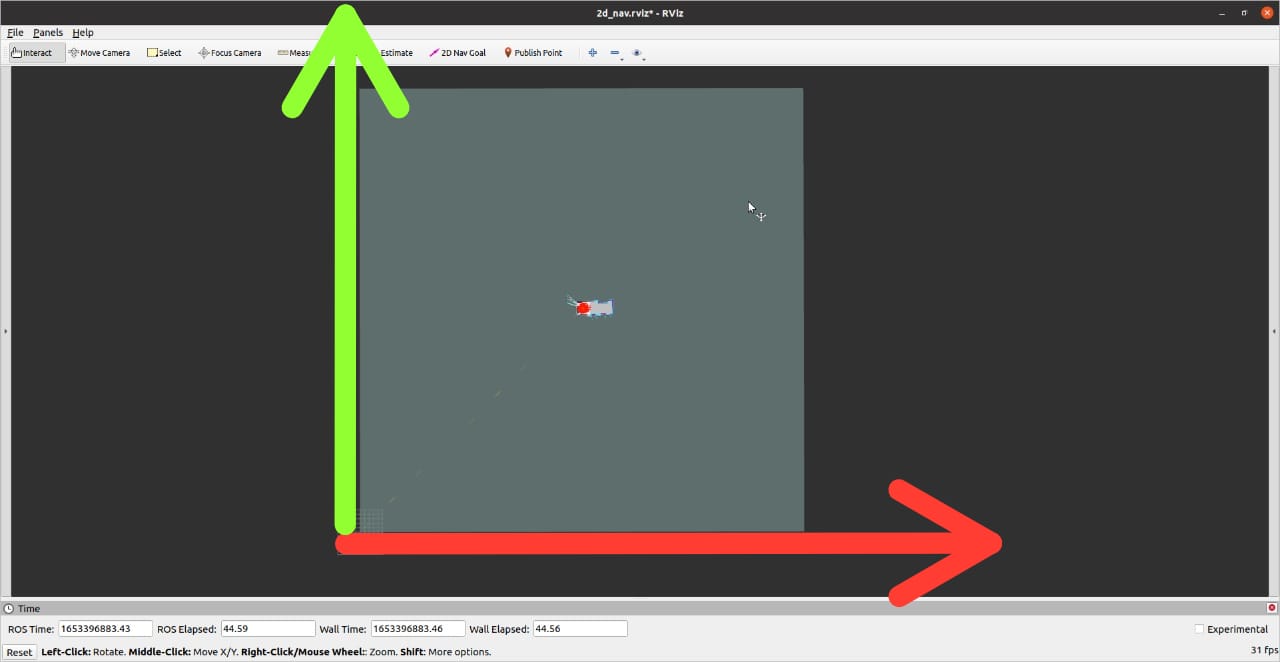
The pink marker indicating robot position comes inside desired location only when transform parameters in free_fleet server launch file are set to start’s (x,y) with signs inverted (from above img).
COORDINATE TRANSFORMATION
translation x (meters): -45.778
translation y (meters): 44.955
rotation (radians): 0.000
scale: 1.000
I also tried the transforms values in right side of layers tab but the pink marker was out of bound.

I think this error might be due to cordinate transform mismatch between RMF and robots coordinate. although i’m not sure how to go about fixing it. i hope you can help me.
Video: https://youtu.be/cUw_Z83D_Mk
Error msg:
[full_control-13] [INFO] [1653048131.295217099] [test_fleet_fleet_adapter]: Assignments updated for robots in fleet [test_fleet] to accommodate task_id [patrol.dispatch-0]
[full_control-13] [INFO] [1653048131.298124513] [test_fleet_fleet_adapter]: Beginning new task [patrol.dispatch-0] for [test_fleet/testbot]. Remaining queue size: 0
[full_control-13] [ERROR] [1653048131.868593768] [test_fleet_fleet_adapter]: Robot named [testbot] belonging to fleet [test_fleet] is very far [2.958652m] from where it is supposed to be, but its remaining path is empty. This means the robot believes it is finished, but it is not where it's supposed to be.
[full_control-13] [ERROR] [1653048132.367955572] [test_fleet_fleet_adapter]: Robot named [testbot] belonging to fleet [test_fleet] is very far [2.958652m] from where it is supposed to be, but its remaining path is empty. This means the robot believes it is finished, but it is not where it's supposed to be.
[full_control-13] [ERROR] [1653048132.867835017] [test_fleet_fleet_adapter]: Robot named [testbot] belonging to fleet [test_fleet] is very far [2.958652m] from where it is supposed to be, but its remaining path is empty. This means the robot believes it is finished, but it is not where it's supposed to be.
[full_control-13] [ERROR] [1653048133.368504503] [test_fleet_fleet_adapter]: Robot named [testbot] belonging to fleet [test_fleet] is very far [2.958652m] from where it is supposed to be, but its remaining path is empty. This means the robot believes it is finished, but it is not where it's supposed to be.
[full_control-13] [ERROR] [1653048133.868815366] [test_fleet_fleet_adapter]: Robot named [testbot] belonging to fleet [test_fleet] is very far [2.958652m] from where it is supposed to be, but its remaining path is empty. This means the robot believes it is finished, but it is not where it's supposed to be.
Robot’s rmf ws: GitHub - KamalanathanN/testbot: testbot for testing RMF
Client launch file: testbot_ff_client.launch · GitHub
Server launch file: testbot_ff_server.launch · GitHub