We’re releasing a small ROS 2 suite that turns Google MediaPipe Tasks into reusable components.
A single parameterized node switches between hand / pose / face, publishes landmarks + high-level gesture events, ships RViz viz (overlay + MarkerArray), and a turtlesim demo for perception → event → behavior.
Newcomer note: This is my first ROS 2 package—I kept the setup minimal so students and prototypers can plug MediaPipe into ROS 2 in minutes.
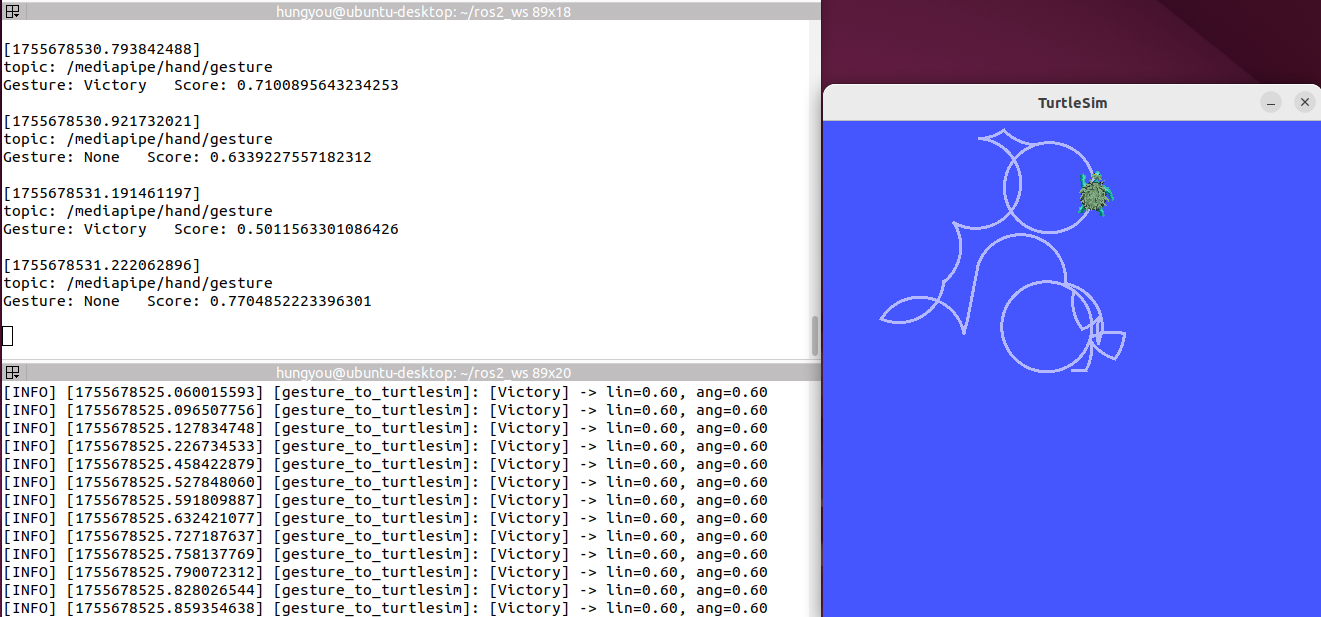
Turtlesim Demo:
Repo: https://github.com/PME26Elvis/mediapipe_ros2_suite · ROS 2: Humble (CI), Jazzy (experimental) · License: Apache-2.0
CI: Humble — passing (required) · Jazzy — experimental (non-blocking)
Quick start:
ros2 run v4l2_camera v4l2_camera_node
ros2 launch mediapipe_ros2_py mp_node.launch.py model:=hand image_topic:=/image_raw start_rviz:=true
ros2 run turtlesim turtlesim_node & ros2 run mediapipe_ros2_py gesture_to_turtlesim
Feedback & contributions welcome.