We’d like to share a recent research project where our AgileX Robotics PiPER 6-DOF robotic arm was used to validate UniVLA, a novel cross-morphology policy learning framework developed by the University of Hong Kong and OpenDriveLab.
Paper: Learning to Act Anywhere with Task-Centric Latent Actions
arXiv: [2505.06111] UniVLA: Learning to Act Anywhere with Task-centric Latent Actions
Code: GitHub - OpenDriveLab/UniVLA: [RSS 2025] Learning to Act Anywhere with Task-centric Latent Actions
Motivation
Transferring robot policies across platforms and environments is difficult due to:
- High dependence on manually annotated action data
- Poor generalization between different robot morphologies
- Visual noise (camera motion, background movement) causing instability
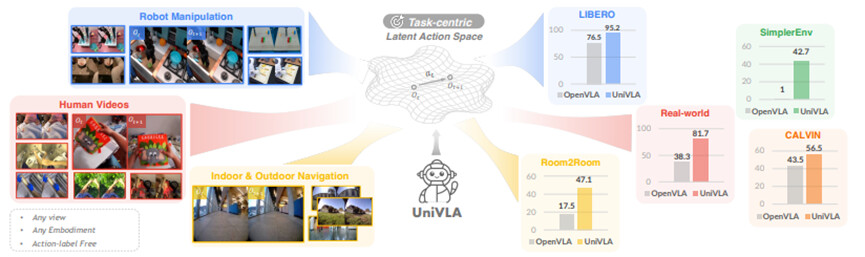
UniVLA addresses this by learning latent action representations from videos, without relying on action labels.
Framework Overview

UniVLA introduces a task-centric, latent action space for general-purpose policy learning. Key features include:
- Cross-hardware and cross-environment transfer via a unified latent space
- Unsupervised pretraining from video data
- Lightweight decoder for efficient deploymen

Figure2: Overview of the UniVLA framework. Visual-language features from third-view RGB and task instruction are tokenized and passed through an auto-regressive transformer, generating latent actions which are decoded into executable actions across heterogeneous robot morphologies.
PiPER in Real-World Experiments
To validate UniVLA’s transferability, the researchers selected the AgileX PiPER robotic arm as the real-world testing platform.
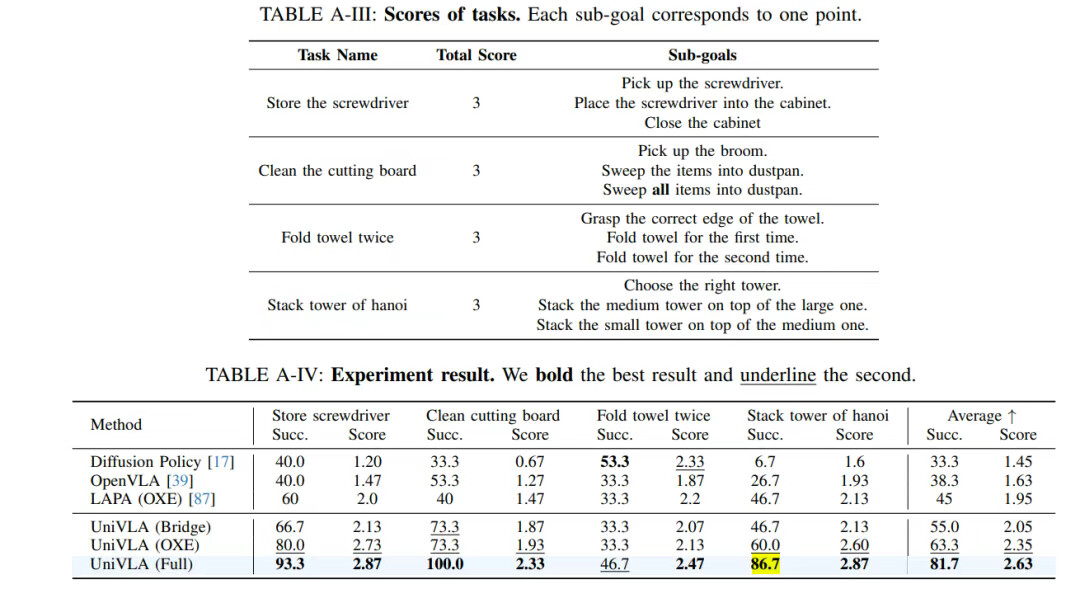
Tasks tested:
- Store a screwdriver
- Clean a cutting board
- Fold a towel twice
- Stack the Tower of Hanoi
These tasks evaluate perception, tool use, non-rigid manipulation, and semantic understanding.
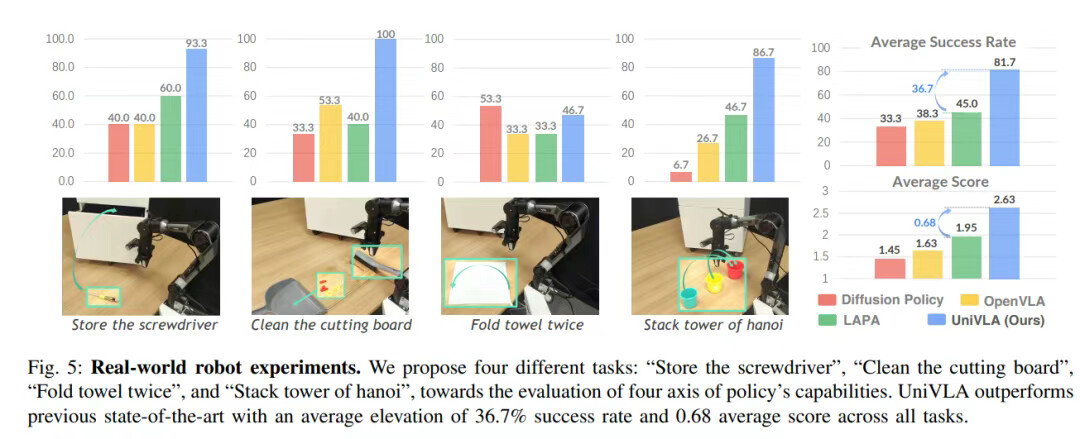
Experimental Results
- Average performance improved by 36.7% over baseline models
- Up to 86.7% success rate on semantic tasks (e.g., Tower of Hanoi)
- Fine-tuned with only 20–80 demonstrations per task
- Evaluated using a step-by-step scoring system
About PiPER
PiPER is a 6-DOF lightweight robotic arm developed by AgileX Robotics. Its compact structure, ROS support, and flexible integration make it ideal for research in manipulation, teleoperation, and multimodal learning.
Learn more: PiPER
Company website: https://global.agilex.ai
Click the link below to watch the experiment video using PIPER:

Collaborate with Us
At AgileX Robotics, we work closely with universities and labs to support cutting-edge research. If you’re building on topics like transferable policies, manipulation learning, or vision-language robotics, we’re open to collaborations.
Let’s advance embodied intelligence—together.