Posted by @bds8933:
Hi,
release: Iron
I’m testing the mutex feature using the office scenario in rmf_demos. The problem is that robots cannot enter the area where the mutex groups are configured.
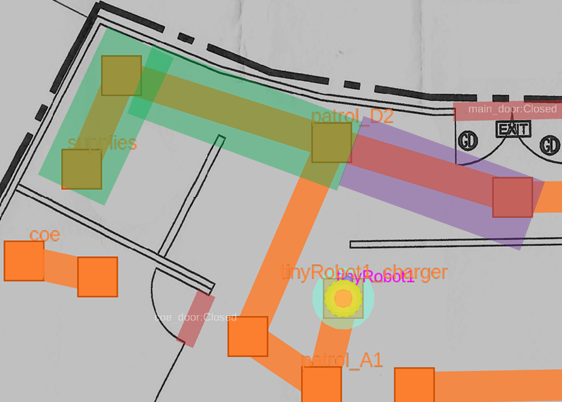
The green area is the mutex group I named “supp”, and the purple area is the one I named “suppenter.”
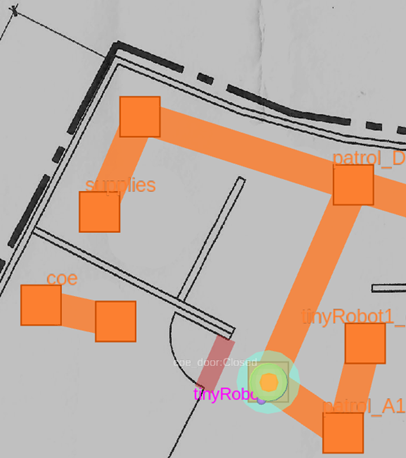
When I send tinyRobot1 to supplies, the path is generated as shown in the image below.
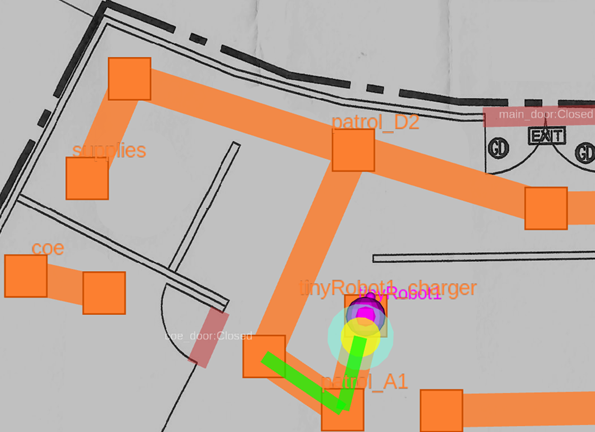
Even though there are no other robots in the mutex group, the robot remains stationary and displays the message:
[fleet_adapter-16] [INFO] [1751005938.028222993] [tinyRobot_fleet_adapter]: Waiting to lock mutex groups [supp] for robot [tinyRobot/tinyRobot1].
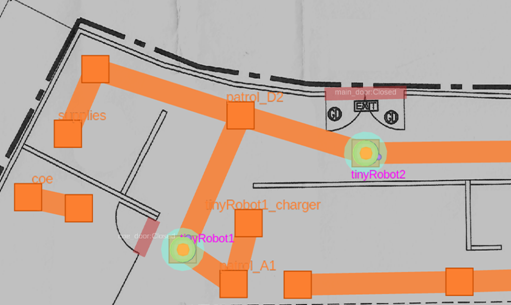
Even when two robots are sent at the same time, the same issue occurs.
[fleet_adapter-16] [INFO] [1751005938.028222993] [tinyRobot_fleet_adapter]: Waiting to lock mutex groups [supp] for robot [tinyRobot/tinyRobot1]
[fleet_adapter-16] [INFO] [1751005946.066037290] [tinyRobot_fleet_adapter]: Waiting to lock mutex groups [suppenter][supp] for robot [tinyRobot/tinyRobot2]
’ve applied the mutex setting to both the vertices and lanes that belong to the mutex group. I’d appreciate it if you could let me know whether this approach is correct, and if not, how I should configure it properly.
Chosen answer
Answer chosen by @bds8933 at 2025-06-27T08:00:16Z.
Answered by @mxgrey:
Check what release you’re using and see whether you’re using a version of rmf_demos that has the mutex group supervisor in the common.launch.xml.
You selected Iron as your release, but that’s long past being supported. The mutex group supervisor was only added to the common.launch.xml recently.