Hey everyone,
I wanted to share my new LiDAR-Inertial Odometry system, RKO-LIO:
Below is an example of the results on data from different platforms and environments.
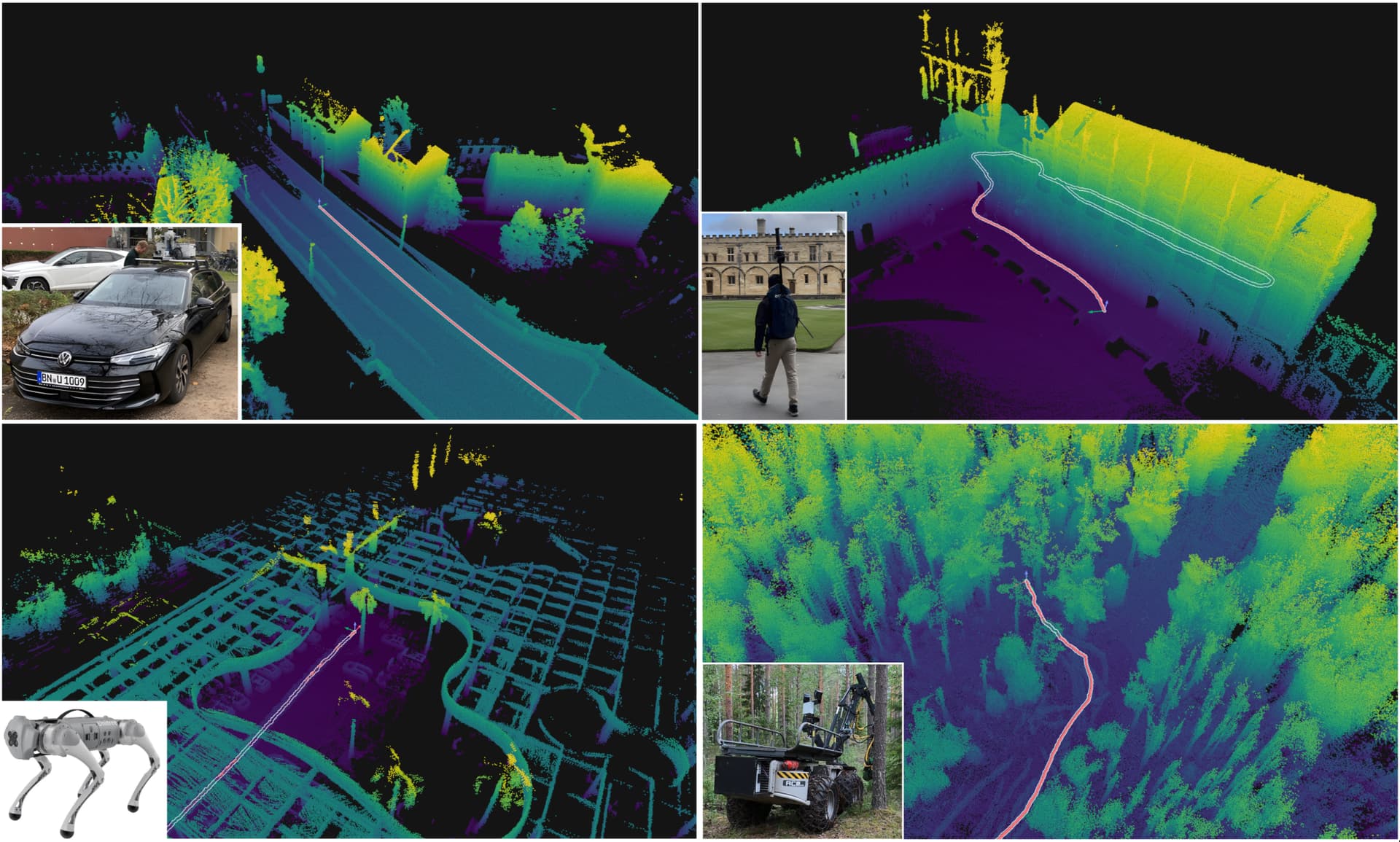
One of the main goals was to make the odometry run with little to no configuration, out of the box. The only real requirement for the system is the extrinsic calibration between the IMU and LiDAR. If that’s available, the defaults should just work. If tuning is needed, the parameters are straightforward and their number minimal.
Supported ROS distros: Humble, Jazzy, Kilted, and Rolling.
The package is already released, so you can simply install it with:
sudo apt install ros-${ROS_DISTRO}-rko-lio
ros2 launch rko_lio odometry.launch.py
For a quick test, there’s also a Python interface you can install via pip (no ROS setup needed)
pip install rko_lio rosbags rerun-sdk
rko_lio -v /path/to/your/rosbag
If your bag includes a TF tree, the extrinsics will be automatically extracted.
Documentation is also available and being updated over time, at
Note that the docs there may trail a few days behind the main repo (as and when the ROS build farm runs the doc job).
I’d really appreciate it if the community could try it out, and share any feedback.
Best,
Meher