Posted by @Narayan-007:
I am currently working on a project where I am creating a simulation world to demonstrate the various tasks in Open-RMF. I took a short break from it, and when I try to rm -rf my build and install directories for this package and colcon build it, I am getting the below error:
fyp-user@rric:~/rmf_ws$ colcon build --packages-select rmf_gazebo
Starting >>> rmf_gazebo
--- stderr: rmf_gazebo
[Err] [FuelClient.cc:717] Failed to download model.
Server: https://fuel.gazebosim.org
Route: openrobotics/models/teleportingestor/tip/teleportingestor.zip
REST response code: 404
[Err] [FuelClient.cc:717] Failed to download model.
Server: https://fuel.gazebosim.org
Route: openrobotics/models/teleportingestor/tip/teleportingestor.zip
REST response code: 404
[Err] [FuelClient.cc:717] Failed to download model.
Server: https://fuel.gazebosim.org
Route: openrobotics/models/teleportingestor/tip/teleportingestor.zip
REST response code: 404
[Err] [FuelClient.cc:717] Failed to download model.
Server: https://fuel.gazebosim.org
Route: openrobotics/models/teleportingestor/tip/teleportingestor.zip
REST response code: 404
[Err] [FuelClient.cc:717] Failed to download model.
Server: https://fuel.gazebosim.org
Route: openrobotics/models/teleportingestor/tip/teleportingestor.zip
REST response code: 404
[Err] [FuelClient.cc:717] Failed to download model.
Server: https://fuel.gazebosim.org
Route: openrobotics/models/teleportingestor/tip/teleportingestor.zip
REST response code: 404
[Err] [FuelClient.cc:717] Failed to download model.
Server: https://fuel.gazebosim.org
Route: openrobotics/models/teleportingestor/tip/teleportingestor.zip
REST response code: 404
[Err] [FuelClient.cc:717] Failed to download model.
Server: https://fuel.gazebosim.org
Route: openrobotics/models/teleportingestor/tip/teleportingestor.zip
REST response code: 404
[Err] [FuelClient.cc:717] Failed to download model.
Server: https://fuel.gazebosim.org
Route: openrobotics/models/teleportingestor/tip/teleportingestor.zip
REST response code: 404
[Err] [FuelClient.cc:717] Failed to download model.
Server: https://fuel.gazebosim.org
Route: openrobotics/models/teleportingestor/tip/teleportingestor.zip
REST response code: 404
gmake[2]: *** [CMakeFiles/generate_my_environment_2_world.dir/build.make:74: maps/my_environment_2/my_environment_2.world] Error 1
gmake[2]: *** Deleting file 'maps/my_environment_2/my_environment_2.world'
gmake[1]: *** [CMakeFiles/Makefile2:201: CMakeFiles/generate_my_environment_2_world.dir/all] Error 2
gmake: *** [Makefile:146: all] Error 2
---
Failed <<< rmf_gazebo [17.3s, exited with code 2]
Summary: 0 packages finished [18.0s]
1 package failed: rmf_gazebo
1 package had stderr output: rmf_gazebo
I also got the same error for ‘teleportdispenser’ the first time I ran it, why is this occuring? I never got this issue before.
Edited by @mxgrey at 2025-01-02T04:08:18Z
Chosen answer
Answer chosen by @luca-della-vedova at 2025-01-02T05:55:12Z.
Answered by @luca-della-vedova:
Hello!
I noticed that the model that is failing to download is specifically the TeleportIngestor. This model is indeed not uploaded to Fuel so the failure is expected (it is instead present in the rmf_demos_assets package).
I also noticed that the error you get is a FuelClient error, suggesting that the models are being downloaded through Fuel rather than plain HTTP requests.
Two ideas, with the first being the preferred one:
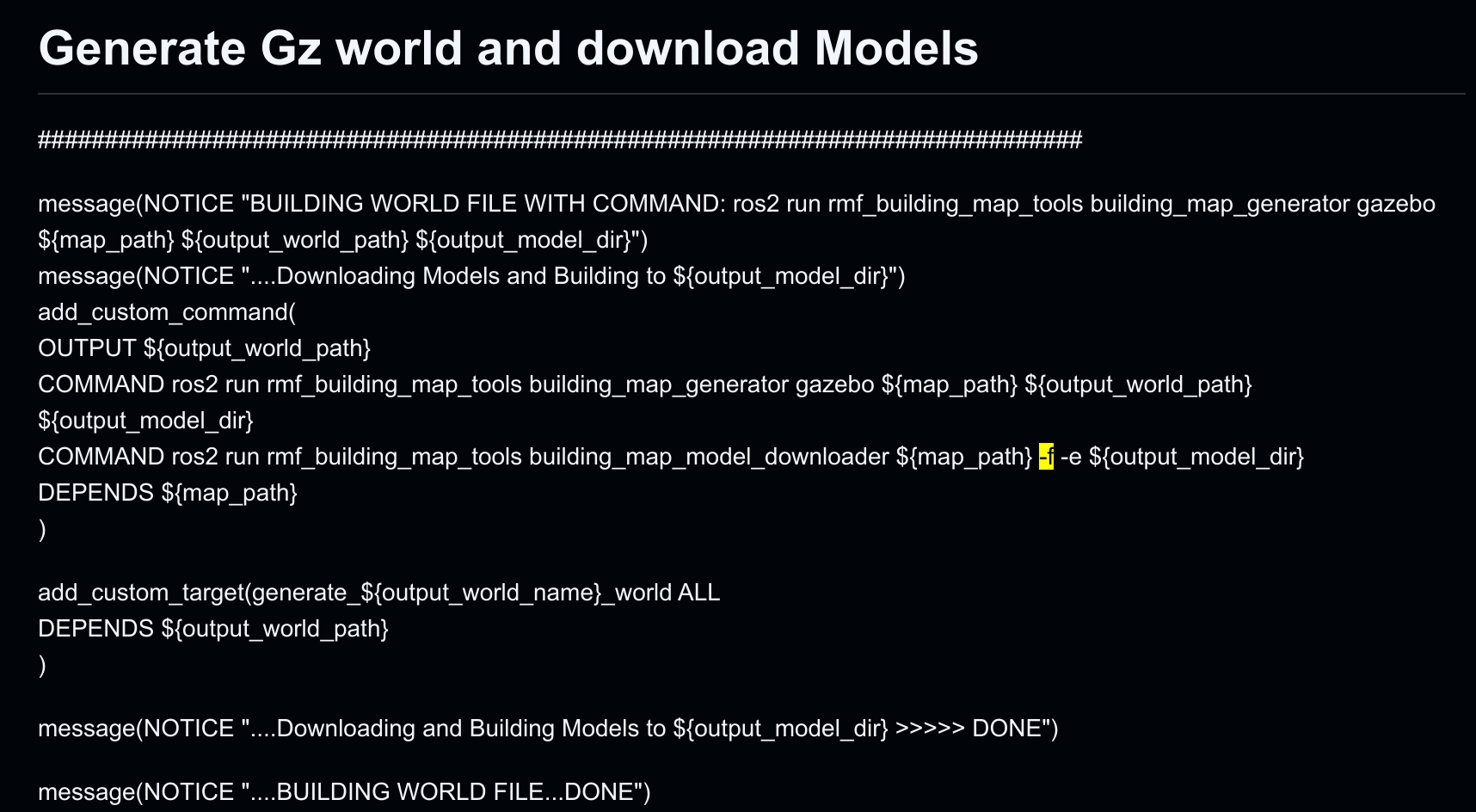
- You can switch to not use Fuel for your model downloads and just pure http requests. This was done in
rmf_demossome time ago (removing the-fflag here) so updating yourrmf_gazeboCMakeLists.txt file the same way should fix the issue. - Another alternative, if you are not doing delivery tasks, you can just remove any
TeleportIngestorfrom your map, there should be instances ofOpenRobotics/TeleportIngestorin your.building.yamlfile, since I see that there are notTeleportDispensermodels being reported as missing this might work for you.
Finally, since we haven’t used the -f flag in a long time it stopped working but this sounds like an issue that should be fixed. I’ll look into it