AI for Industry Challenge | Challenge Details
Hello everyone ![]()
For those who don’t know me, I’m Yadu - software engineer at Intrinsic and formerly OSRC. I have the privilege of serving on the Project Management Committees for ROS 2 & Open-RMF and co-chair the SIG for Physical AI. Together with open source development and maintenance, I’ve been a strong advocate for how our ecosystem is the primary engine for industrial innovation. To keep that momentum going, I’m thrilled to share more about the AI for Industry Challenge we’re hosting at Intrinsic.
------------------
The AI for Industry Challenge invites participants to tackle complex dexterous manipulation tasks inspired by real-world assembly problems in electronics.
The core focus of the Challenge is the assembly and wiring of server trays, from the insertion of various connectors to complete cable handling.
Automating cable assembly and wiring is a notoriously difficult automation challenge due to the high mix and variance between cable types, the high cost of errors and the complex technical hurdles of modeling and manipulating deformable objects.
Challenge Participants will be tasked with developing a visual-sensory-motor policy and robotics application for flexible manipulation and insertion tasks, providing an automated solution for electronics assembly, which today, is a manual, repetitive process.
Think you have what it takes? Make sure you register HERE by April 17, 2026.
Looking For a Team?
To participate in the challenge, you will need to register or join a team. Teams may be composed of one person or a group of people.
Reach out to colleagues or peers to form your team or use our Official: Looking for a team discourse topic to let others know you would be interested in joining a team, or to invite others onto yours.
Participant Toolkit:
On March 2nd, our participant toolkit will be accessible for each participant who registers. This toolkit will include:
-
Scene description*: Complete environment in SDFormat (.sdf).
-
High-fidelity assets*: Robot (URDF/SDF), sensors (SDFormat), and environment models.
-
Standardized ROS interfaces: Defined topics, services, and message types for sensors and commands.
-
Reference controller & HAL: Baseline controller and hardware abstraction layer for simulated and real robots.
-
Formal task description: Document outlining objectives, rules, and constraints.
-
Baseline Gazebo environment: Fully configured simulation for reference and evaluation.
*Please note partner toolkits and formats may differ.
The hardware stack consists of: -
Arm: Universal Robots UR5e
-
Gripper: Robotiq Hand-E
-
Sensor: Axia80 Force-Torque sensor
-
Vision: Three wrist-mounted Basler cameras
*Comprehensive specifications will be included in the participant toolkit.
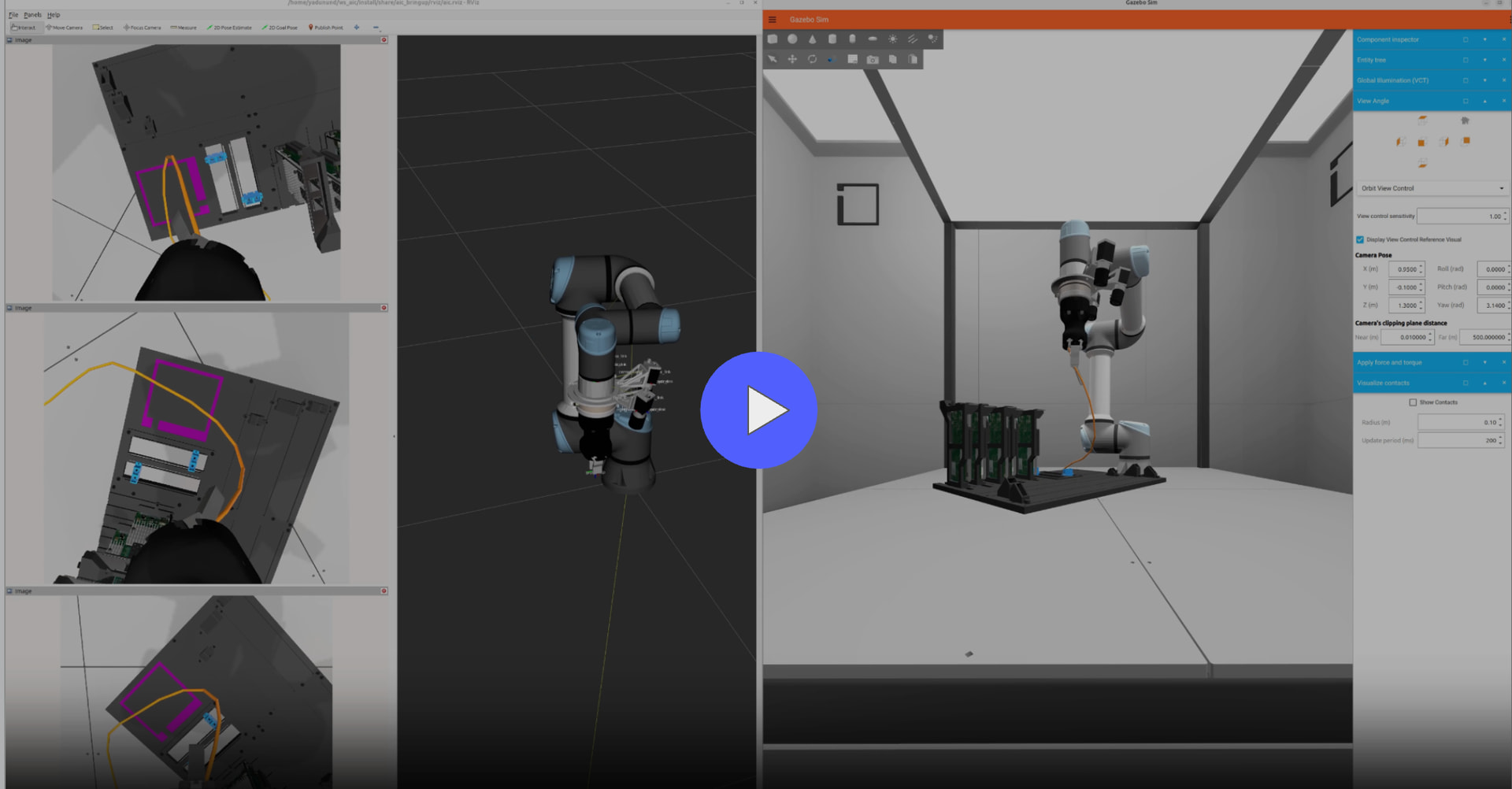
Toolkit Sneak Peek (click to play):
Three Phases of the Challenge:
The Challenge will be broken down into three distinct phases:
- Qualification (~3 months) - “Train Your Model”
- During qualification, use your favorite tools and open-source simulators (e.g., Isaac Sim, MuJoCo, Gazebo), while leveraging ROS for communication, to train your model and solve the cable insertion task. Submitted models will be evaluated using Gazebo.
- Phase #1: (~1 month) - “Develop in Flowstate”
- For those who advance to phase #1 - teams will gain access to Intrinsic Flowstate, our development environment, and the Intrinsic Vision Model —our award-winning foundation model - to build a complete robotic cable handling solution using their trained models.
- Phase #2: (~1 month) - “Run on Real Robots”
- Phase #2 participants will get the chance to deploy their solution to a robotic workcell set up at Intrinsic’s HQ - for real world solution validation and a chance to win prizes.
Timeline & Winner Announcements:
- Mar. 2, 2026 Toolkit Launch Date
- Apr. 17, 2026 Registration Deadline
- May 15, 2026 Qualification Phase
- July 14, 2026 Phase #1
- Aug. 25, 2026 Phase #2, overall winners announced
Prizes:
$180,000 in cash prizes.
- First place team: $100,000
- Second place team: $40,000
- Third place team: $20,000
- Fourth and fifth place teams: $10,000
Challenge Rules & FAQ:
Have more questions? Please refer to our official Challenge Rules for information relating to eligibility and participation in the AI for Industry Challenge. Or visit our FAQs at the bottom of our webpage.