Here is my environment.
- Ubuntu 16.04 with ROS Kinetic.
- Autoware.AI Ver.1.10.0 in the docker.
- LG SVL Simulator 2019.01 and 2018.12-rc1
Here are my configurations of LG SVL Simulator.
Here are the screenshots of RQt.

But there are nothing in the RViz, I can’t use Autoware to control the simulator.
I wonder to get some help. Thank you very much. I am looking forward to hearing from you soon.
Mouri.
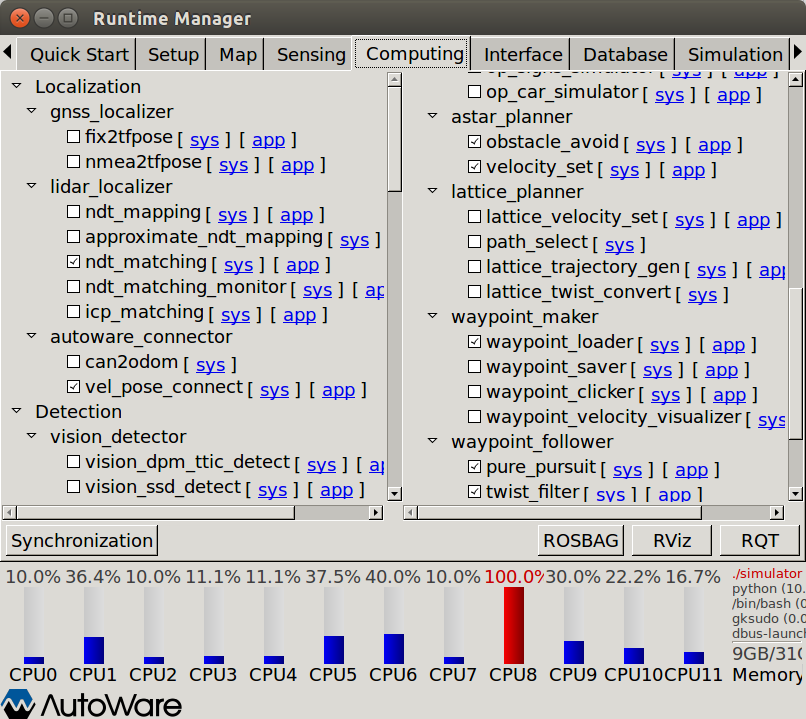
Note: Here are my configurations of Autoware Runtime Manager.
Hi!
I want to check 2 things.
1.Did you set initial pose??
2.Did you click tf button in Map tab??
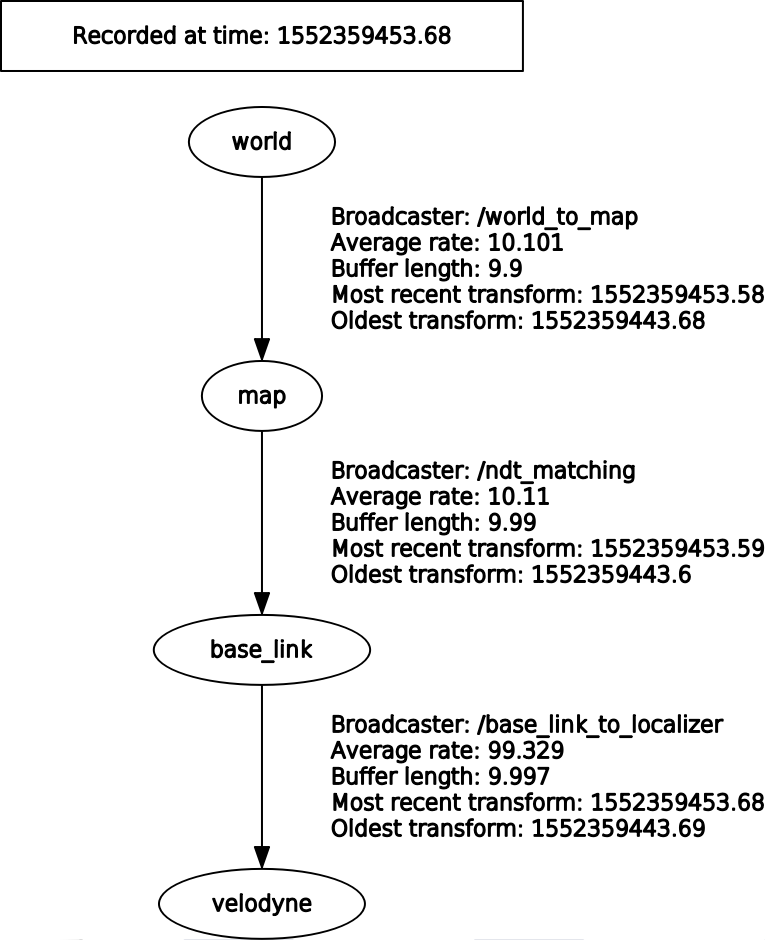
2 is necessary for publishing world → map frame.
@hakuturu583
I didn’t set the initial pose and I don’t know how to set it.
I tried to click tf button in Map tab just now and I can see the map on the RViz.
But I can’t see the position of the car.
Mouri
Please use 2D Pose Estimate in rviz.
I have used that.
But I don’t know how to drive the car in the simulator autonomously via Autoware.
Mouri.
I think you have no waypoint for the Autoware.
Please use this waypoint!!
How to use the “this waypoint”? 
Sorry… now try uploading CSV file.
csv waypoint file.
You can load this waypoint file in waypoint_loader package.
I add waypoint csv file to the fire storage.
http://xfs.jp/8VtHnT
download password is “autoware”
Now I can use the lgsvl_simulator.rviz
But I couldn’t see the map.
Can you use Autoware/ros/.config/default.rviz?
I have used it.
lgsvl_simulator.rviz is OK.
But default.rviz is not OK. I can’t find my car.
I think you are using sim_default.urdf in Setup tab.
Please use xe.urdf
I can’t find xe.urdf in the autoware repository.
Mouri.
amc-nu
21
2 Likes
I have updated to the 1.11.0
When I click the LGSVL Simulator, the error message shown.
[rosrun] Couldn’t find executable named rqt_lgsvl_simulator_configurator below /home/autoware/Autoware/ros/install/lgsvl_simulator_bridge/share/lgsvl_simulator_bridge
Mouri